刚体的平面运动(摘要)
贡献者: ACertainUser; addis
1. 刚体
刚体可视作一种特殊的质点系:质点之间存在约束并从不相对运动;同时,刚体中质量的分布是连续的而非离散的。因此,质点系的所有结论仍然适用于刚体。
自由度
自由度可以理解为 “确定系统状态所需的独立物理量的个数”。
单一质点有 $3$ 个自由度,即 $x,y,z$ 坐标(质点自身不能旋转,因此没有旋转角度的自由度);而具有 $N$ 个质点的质点系有 $3N$ 个自由度,即各个质点的坐标(质点系中,各质点的状态或位置没有直接明确的约束)。
作为对比,由于刚体内质点间的刚性约束,刚体只有 $6$ 个自由度,即质心的 $x,y,z$ 坐标与关于 $x,y,z$ 轴的旋转角度。在平面运动(见下文)中,刚体有 $4$ 个($x,y,z$ 坐标与关于转轴的旋转角度)或 $3$ 个自由度(假定刚体在 $z=z_0$ 平面内运动,那么自由度只剩下 $x,y$ 坐标与关于转轴的旋转角度)。
| 质点 | 质点系 | 刚体 | 刚体(平面运动) | |
| 自由度 | $3$ | $3N$ | $6$ | $4$ 或 $3$ |
2. 刚体运动学:描述刚体的运动
平动

刚体平动前后,刚体中任意两点的连线依然平行。同时,刚体内各质点的位移、速度、加速度等都相同。
定轴转动

刚体定轴转动 前后,刚体中任意两点的连线不再平行,各质点的速度、加速度等也不再相同,但角速度、角加速度等圆周运动量还是相同。由圆周运动与曲线运动的知识可以得出各质点的运动状态。
例 1 平动还是转动
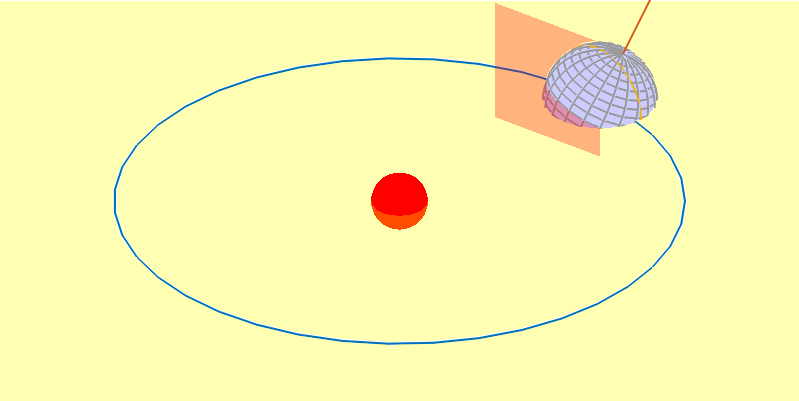
如图所示,如果不考虑地球的自转,那么地球的 “公转” 是平动还是转动?
有点违反直觉的是,地球的 “公转” 还是平动,只是他的平动轨迹是一条圆弧线。
作为对比,由于质点没有体积、形状,因此质点只存在 “平动” 问题,而不存在 “转动” 问题。
平面运动=同质心的平动+关于质心轴的定轴转动

刚体的任意平面运动都可分解为 同质心的平动 与 质心系中关于质心轴的定轴转动。也就是说,如果你跟随刚体的质心一起平动,那么你会看到刚体的其余部分正关于质心轴转动。在平面运动的情况下,刚体只绕一个轴转动,因此旋转只有一个自由度。
事实上,除质心之外,我们可以选取任意一点作为基点,并将刚体的平面运动分解为 同该基点的平动 与 固连于基点的参考系中关于过该基点的转轴的定轴转动。有趣的是,不论如何选取基点,你都能观察到相同的角速度与角加速度(但不一定能得到相同的速度或加速度)!这为解决一些问题带来了极大的方便。比如,分析摆锤的运动。
但是,下文的柯尼希定理不能这么分解。要想使用柯尼希定理,你必须选取质心作为基点。
运动学公式
以上内容可总结为如下公式。其实,我们只是在刚体中运用了伽利略变换:
| 位矢 | 速度 | 加速度 | |
| 平动 | $ \boldsymbol{\mathbf{r}} _A = \boldsymbol{\mathbf{r}} _C + \boldsymbol{\mathbf{r}} _{AC}$,$ \boldsymbol{\mathbf{r}} _{AC}$ 是常数 | $ \boldsymbol{\mathbf{v}} _A = \boldsymbol{\mathbf{v}} _C$ | $ \boldsymbol{\mathbf{a}} _A = \boldsymbol{\mathbf{a}} _C$ |
| 定轴转动(转轴在原点) | $ \boldsymbol{\mathbf{r}} _A = \boldsymbol{\mathbf{r}} _{AC}$,$\theta =\theta (t)$ | $ \boldsymbol{\mathbf{v}} _A = \boldsymbol{\mathbf{\omega}} \times \boldsymbol{\mathbf{r}} _{AC}$ | $ \boldsymbol{\mathbf{a}} _A = \boldsymbol{\mathbf{a}} _t + \boldsymbol{\mathbf{a}} _n$ |
| 平面运动(质心为基点) | $ \boldsymbol{\mathbf{r}} _A = \boldsymbol{\mathbf{r}} _C + \boldsymbol{\mathbf{r}} _{AC}$,$\theta =\theta (t)$ | $ \boldsymbol{\mathbf{v}} _A = \boldsymbol{\mathbf{v}} _C + \boldsymbol{\mathbf{\omega}} \times \boldsymbol{\mathbf{r}} _{AC}$ | $ \boldsymbol{\mathbf{a}} _A = \boldsymbol{\mathbf{a}} _C + \boldsymbol{\mathbf{a}} _t + \boldsymbol{\mathbf{a}} _n$ |
其中,
- $ \boldsymbol{\mathbf{r}} _A, \boldsymbol{\mathbf{v}} _A, \boldsymbol{\mathbf{a}} _A$ 是某参考系中点 $A$ 的位矢、速度、加速度。
- $ \boldsymbol{\mathbf{r}} _C, \boldsymbol{\mathbf{v}} _C, \boldsymbol{\mathbf{a}} _C$ 是某参考系中质心的位矢、速度、加速度。
- $ \boldsymbol{\mathbf{r}} _{AC} = \boldsymbol{\mathbf{r}} _A - \boldsymbol{\mathbf{r}} _C $ 是该点 $A$ 与质心的相对位矢。$ \boldsymbol{\mathbf{r}} _{AC}$ 的模长始终不变
- $ \boldsymbol{\mathbf{\omega}} , \boldsymbol{\mathbf{\alpha}} $ 是质心系中刚体转动的角速度与角加速度
- $ \boldsymbol{\mathbf{a}} _t, \boldsymbol{\mathbf{a}} _n$ 是质心系中点 $A$ 圆周运动的切向与法向加速度。$a_t=r_{AC}\alpha, a_n=r_{AC}\omega^2$
3. 刚体动力学:驱动刚体运动的原因
转动惯量
我们先从定轴转动的角动量出发,引入转动惯量的概念。刚体做定轴转动时,系统的角动量是各个质点的角动量之和 $$L = \sum r_\perp p = \sum r_\perp \Delta m v = \sum r_\perp \Delta m \omega r_\perp = \omega \sum r_\perp^2 \Delta m~.$$
我们发现其中 $\sum r_\perp^2 \Delta m$ 是无关转动角速度的量,但是有关刚体几何形状、质量分布、转轴位置等。由于刚体的质量是连续分布的,因此常写为积分形式。由此,我们定义转动惯量 $$ I =\sum r_\perp^2 \Delta m = \int_V r_\perp^2 \,\mathrm{d}{m} ~, $$ 那么 $$ L = I \omega~.$$
同理,从定轴转动的转动动能出发,也容易得到相应的结果 。 $$E_k = \sum \frac{1}{2} \Delta m v^2 = \frac{1}{2} \sum \Delta m (\omega r_\perp)^2 = \frac{1}{2} \omega^2 \sum r_\perp^2 \Delta m = \frac{1}{2} I \omega^2~.$$
因此我们说,类似于质量衡量了物体的 “(平动)惯性”,转动惯量衡量了物体的 “转动惯性”。你最好熟悉一些基本几何体的转动惯量,以及转动惯量的几个非常重要的定理 。
柯尼希定理:动能=平动动能+转动动能
我们知道柯尼希定理:某参考系中质点系的动能=该参考系中质心的动能+质心参考系中系统的动能。在刚体这个特殊的质点系中,柯尼希定理依然成立,并更有物理意义:某参考系中刚体的平面运动动能=该参考系中质心的平动动能+质心参考系中刚体的转动动能: $$E_k = \frac{1}{2}Mv_c^2 + \frac{1}{2} I_c \omega^2~,$$ 其中 $M$ 是刚体的质量,$v_c$ 是刚体质心的平动速率,$I_c$ 是刚体关于质心轴的转动惯量,$\omega$ 是刚体的转动角速度。
你不能选取质心之外的点,然后试图套用柯尼希定理!
平面运动 动力学方程
刚体的平面运动方程
| 名称 | 公式 | 相应的物理量 1 | 相应的物理量 2 |
| 动量定理 | $\sum \boldsymbol{\mathbf{F}} _i = \frac{\mathrm{d}{ \boldsymbol{\mathbf{P}} }}{\mathrm{d}{t}} = M \boldsymbol{\mathbf{a}} _c$ | $\sum \boldsymbol{\mathbf{F}} _i$ 是外力和 | $ \boldsymbol{\mathbf{P}} $ 是刚体的动量,$M$ 是刚体的质量,$ \boldsymbol{\mathbf{a}} _c$ 是质心加速度 |
| 角动量定理 | $\sum ( \boldsymbol{\mathbf{r}} - \boldsymbol{\mathbf{r}} _c) \times \boldsymbol{\mathbf{F}} _i = \frac{\mathrm{d}{ \boldsymbol{\mathbf{L}} }}{\mathrm{d}{t}} = I \boldsymbol{\mathbf{\alpha}} $2 | $\sum ( \boldsymbol{\mathbf{r}} - \boldsymbol{\mathbf{r}} _c)\times \boldsymbol{\mathbf{F}} _i$ 是关于质心的外力矩和 | $ \boldsymbol{\mathbf{L}} $ 是刚体的角动量,$I_c$ 是关于质心轴的转动惯量,$ \boldsymbol{\mathbf{\alpha}} $ 是刚体的转动加速度 |
4. 刚体静力学
刚体的动量定理与角动量定理启发我们,如果刚体所受的外力和与外力矩和均为零3,那么刚体保持静止或做匀速平面运动。这也是我们分析系统静力平衡的重要依据 。
1. ^ 本文参考了张娟的《理论力学》与谢传峰等的《理论力学》。
2. ^
这个公式的背后存在一些复杂的哲学问题。
我们说“定轴转动”时,已经认为角动量增量总在某一个方向上 $ \frac{\mathrm{d}{ \boldsymbol{\mathbf{L}} }}{\mathrm{d}{t}} = \frac{\mathrm{d}{L}}{\mathrm{d}{t}} \hat{ \boldsymbol{\mathbf{z}} }$;
但从公式本身看,我们似乎不能保证外力矩都恰好在这个方向上,$\sum ( \boldsymbol{\mathbf{r}} - \boldsymbol{\mathbf{r}} _c) \times \boldsymbol{\mathbf{F}} _i$ 的方向似乎是任意的。
理解这个问题的两种思路:
1.刚体是被某种刚体之外的物理转轴钉死,转轴总会提供一个反向的力矩,来平衡那些不在转轴方向上的外力矩,因此刚体只能在转轴上转动;
2.我们施加的外力矩并不是“任意的”,而是精心选择的、只在转轴方向上的。
3. ^ 即使外力和为零,外力矩和也不一定为零!