贡献者: 叶月2_; addis
预备知识 1 轨道角动量(量子力学),旋转算符
,自旋角动量
1. 空间转动与角动量生成元
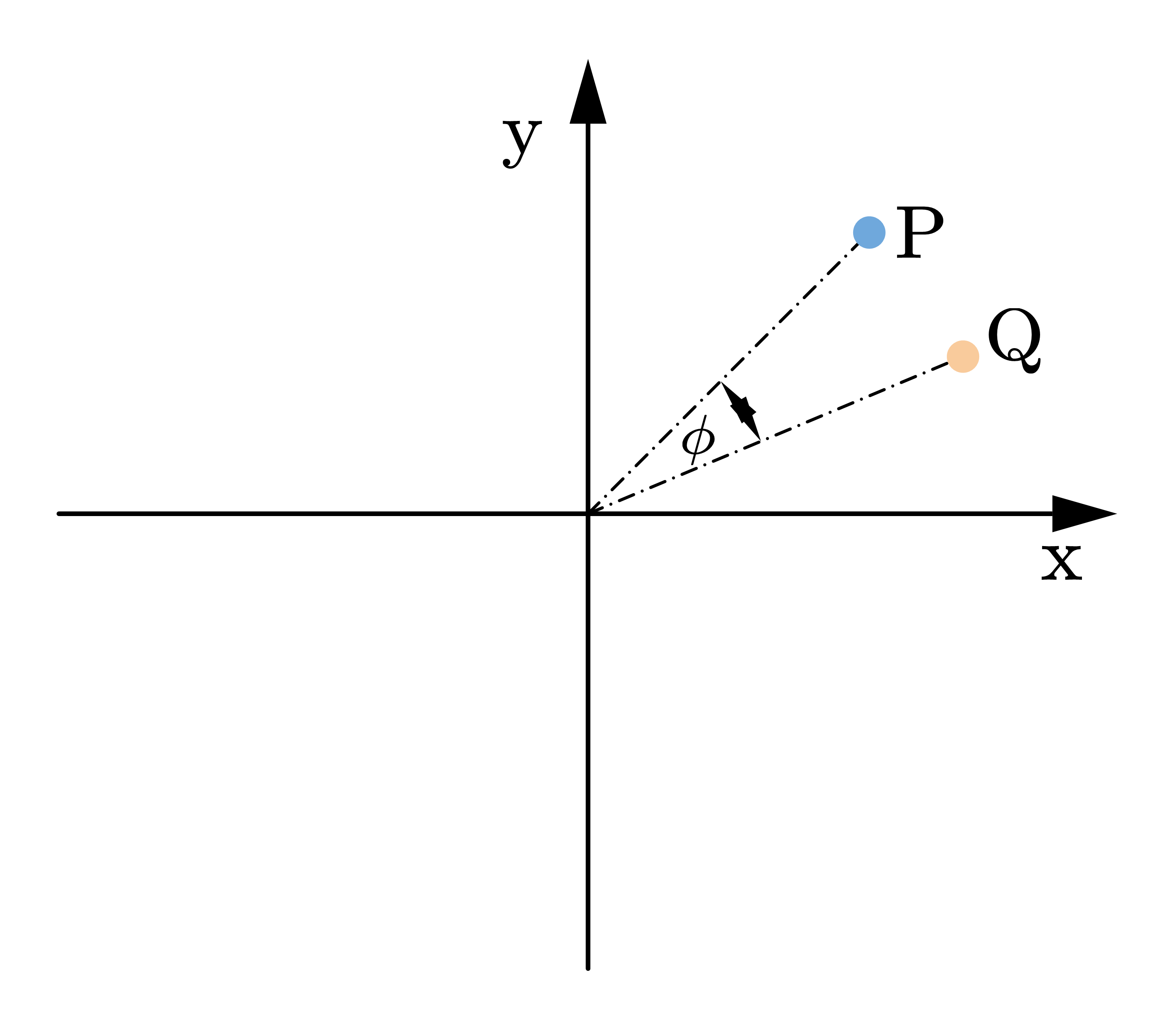
在物理里,常有系统 “主动旋转” 与坐标系 “被动旋转” 之分。如下图所示,系统 $P$ 和附着在坐标系上的 $Q$ 点到原点的距离相同。因此,若系统要到达 $Q$ 点,可以绕原点顺时针转动 $\phi$ 角,或者坐标系逆时针转动 $\phi$。
图 1
以右手定则确定 $z$ 轴,现在我们逆时针转动系统 $P$,角度为 $\phi$。设原坐标为 $ \boldsymbol{\mathbf{v}} =a \boldsymbol{\mathbf{i}} +b \boldsymbol{\mathbf{j}} +c \boldsymbol{\mathbf{k}} $,新坐标为 $ \boldsymbol{\mathbf{v'}} =a \boldsymbol{\mathbf{i'}} +b \boldsymbol{\mathbf{j'}} +c \boldsymbol{\mathbf{k}} $。稍加计算可知 $ \boldsymbol{\mathbf{i'}} = \begin{pmatrix}\cos \phi &\sin {\phi}\end{pmatrix} ^T, \boldsymbol{\mathbf{j'}} = \begin{pmatrix}-\sin \phi &\cos {\phi}\end{pmatrix} ^T$。所以
\begin{equation}
\boldsymbol{\mathbf{v'}} \equiv R_z(\phi) \boldsymbol{\mathbf{v}} = \begin{pmatrix}\cos\phi&-\sin\phi&0\\\sin\phi&\cos \phi&0\\0&0&1\end{pmatrix} \boldsymbol{\mathbf{v}} ~,
\end{equation}
同理可得
\begin{equation}
R_x(\phi)= \begin{pmatrix}1&0&0\\0&\cos\phi&-\sin\phi\\0&\sin\phi&\cos\phi\end{pmatrix} ,R_y(\phi)= \begin{pmatrix}\cos\phi&0&\sin\phi\\0&1&0\\-\sin\phi&0&\cos\phi\end{pmatrix} ~.
\end{equation}
设绕 $x,y,z$ 轴转动的生成元分别为 $J_x,J_y,J_z$,满足 $ \mathrm{e} ^{- \mathrm{i} J_i\phi}=R_i(\phi)$,则可计算得到三个生成元分别为:
\begin{equation}
\begin{aligned}
J_x&= \mathrm{i} \frac{\mathrm{d}{R_x(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&0&0\\0&0&-1\\0&1&0\end{pmatrix} \\
J_y&= \mathrm{i} \frac{\mathrm{d}{R_y(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&0&1\\0&0&0\\-1&0&0\end{pmatrix} \\
J_z&= \mathrm{i} \frac{\mathrm{d}{R_z(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&-1&0\\1&0&0\\0&0&0\end{pmatrix} ~.
\end{aligned}
\end{equation}
读者可验证,生成元满足对易关系 $[J_i,J_j]= \mathrm{i} \epsilon_{ijk}J_k$,与量子力学的角动量算符对易关系相同。
2. 自旋态矢的 “转动”
未完成:修改旋转算符一节或者合并
从式 7 可知,轨道角动量算符的 $ \mathrm{e} $ 指数关系($ \mathrm{e} ^{- \mathrm{i} \hat L_i\phi/\hbar}$)可以诱导波函数绕 $i$ 轴逆时针转动 $\phi$ 角。于是很自然的一个猜想是:自旋角动量算符是否可以诱导自旋部分的态矢 “转动”?尽管这并非是空间转动,但满足 “旋转” 后的态矢模方不变。
现在我们利用四元数来证明这一点。已知单位四元数 $Q\cong SU(2)$,设线性同构映射 $f$ 为:
\begin{equation}
1\rightarrow \begin{pmatrix}1&0\\0&1\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{i}}} \rightarrow- \mathrm{i} \sigma_1=- \mathrm{i} \begin{pmatrix}0&1\\1&0\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{j}}} \rightarrow - \mathrm{i} \sigma_2=- \mathrm{i} \begin{pmatrix}0&- \mathrm{i} \\ \mathrm{i} &0\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{k}}} \rightarrow - \mathrm{i} \sigma_3=- \mathrm{i} \begin{pmatrix}1&0\\0&-1\end{pmatrix} ~.
\end{equation}
设 $q$ 为任意四元数,则
\begin{equation}
\begin{aligned}
f(q)&=f( \cos\left(\frac{\phi}{2}\right) + \hat{\boldsymbol{\mathbf{k}}} \sin\frac{\phi}{2})\\
&= \begin{pmatrix} \cos\left(\frac{\phi}{2}\right) - \mathrm{i} \sin\left(\frac{\phi}{2}\right) &0\\0& \cos\left(\frac{\phi}{2}\right) + \mathrm{i} \sin\left(\frac{\phi}{2}\right) \end{pmatrix} \equiv \mathrm{e} ^{- \mathrm{i} \hat S_z \phi /\hbar}~,
\end{aligned}
\end{equation}
解得生成元为
\begin{equation}
\hat S_z= \mathrm{i} \hbar \frac{\mathrm{d}{f(q)}}{\mathrm{d}{\phi}} |_{\phi=0}=\frac{\hbar}{2} \begin{pmatrix}1&0\\0&-1\end{pmatrix} ~,
\end{equation}
确实是我们熟知的 $\hat S_z$。同理,用 $ \hat{\boldsymbol{\mathbf{j}}} , \hat{\boldsymbol{\mathbf{i}}} $ 代替 $ \hat{\boldsymbol{\mathbf{k}}} $,可以推导得到 $\hat S_y,\hat S_x$,也是 $\hat S_z$ 表象下的自旋角动量分量形式。因此 $\hat S_x,\hat S_y,\hat S_z$ 是 $SU(2)$ 的生成元,可以诱导对复二维列向量的特殊酉变换。
由上述旋转算符的幺正性可知,特殊酉变换对自旋态矢作用后能保总概率密度不变,然而这和空间旋转不是等价的,因为周期性不同。以式 5 为例,可知当 $\phi=4\pi$ 时,才对应恒等变换,才能让自旋态矢复位。而对于式 1 ,$\phi=2\pi$ 即可让空间向量复位。
习题 1
设系统态矢为 $ \left\lvert \beta \right\rangle = \begin{pmatrix}a^1&a^2\end{pmatrix} ^T$。如果系统 “绕 $z$ 轴转动 $\phi$”,写出转动后的态矢。
自旋期望值的 “旋转”
为方便计,本节采取约定 $\hbar=1$。
以自旋 $1/2$ 的粒子为例,其自旋期望值为 $(\left\langle \hat S_{x}\right\rangle,\left\langle \hat S_{y}\right\rangle,\left\langle \hat S_{z}\right\rangle)$。设该粒子的初始态矢为 $ \left\lvert a \right\rangle $,态矢绕 $z$ 轴 “转动” 后变为 $\mathrm e^{- \mathrm{i} \hat S_z\phi} \left\lvert a \right\rangle $。
则期望值变化为:
\begin{equation}
\left\langle a \right\rvert \hat S_i \left\lvert a \right\rangle \rightarrow \left\langle a \right\rvert \mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_i\mathrm e^{- \mathrm{i} \hat S_z\phi} \left\lvert a \right\rangle ~.
\end{equation}
在 $\hat S_z$ 表象下计算 $\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }$ 得:
\begin{equation}
\begin{aligned}
\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi}&=\mathrm e^{ \mathrm{i} \hat S_z\phi}\left(\frac{1}{2}( \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert )\right)\mathrm e^{- \mathrm{i} \hat S_z\phi}\\
&=\frac{1}{2}\left(\mathrm e^{-\mathrm i t} \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert \mathrm e^{\mathrm i t}\right)\\
&=\frac{1}{2}\left[ \cos\left(\phi\right) ( \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert )+\mathrm i \sin\left(\phi\right) ( \left\lvert + \right\rangle \left\langle - \right\rvert - \left\lvert - \right\rangle \left\langle + \right\rvert )\right]\\
&= \cos\left(\phi\right) \hat S_x- \sin\left(\phi\right) \hat S_y~.
\end{aligned}
\end{equation}
因此,$\hat S_x$ 的期望值变化为:
\begin{equation}
\left\langle \hat S_{x}\right\rangle\rightarrow \left\langle \hat S_{x}\right\rangle \cos\left(\phi\right) -\left\langle \hat S_{y}\right\rangle \sin\left(\phi\right) ~.
\end{equation}
同理可以计算出其他分量的期望值变化:
\begin{equation}
\left\langle \hat S_{y}\right\rangle\rightarrow \left\langle \hat S_{y}\right\rangle \cos\left(\phi\right) +\left\langle \hat S_{x}\right\rangle \sin\left(\phi\right) ~,
\end{equation}
\begin{equation}
\left\langle \hat S_{z}\right\rangle\rightarrow \left\langle \hat S_{z}\right\rangle~.
\end{equation}
因此,自旋期望值可看作经典矢量,态矢绕自旋 $z$ 分量 “旋转” 相当于该矢量绕 $z$ 轴 “旋转”:
\begin{equation}
\begin{pmatrix}
\cos\left(\phi\right) &- \sin\left(\phi\right) &0 \\
\sin\left(\phi\right) & \cos\left(\phi\right) & 0\\
0& 0 &1
\end{pmatrix}
\begin{pmatrix}
\left\langle \hat S_{x}\right\rangle\\
\left\langle \hat S_{y}\right\rangle\\
\left\langle \hat S_{z}\right\rangle
\end{pmatrix}
=
\begin{pmatrix}
\overline{\hat S'_x}\\
\overline{\hat S'_y}\\
\overline{\hat S'_z}
\end{pmatrix}~.
\end{equation}
若态矢绕 $y$ 轴旋转 $\phi$,为计算方便,我们在 $\hat S_y$ 表象下讨论。因为自旋三分量的本征值相同,所以在新表象下,$\hat S'_y=S_z$。设过渡矩阵为 $U$,则
\begin{equation}
\begin{aligned}
\hat S'_y &=U^{\dagger}\hat S_yU=\hat S_z\\
\hat S'_z&=U^{\dagger}\hat S_z U=\hat S_y~.
\end{aligned}
\end{equation}
则 $[\hat S'_y,\hat S'_z]= \mathrm{i} \hat S'_x=[\hat S_z,\hat S_y]=- \mathrm{i} \hat S_x$,所以 $\hat S'_x=- \hat S_x$。
于是
\begin{equation}
\begin{aligned}
\mathrm{e} ^{ \mathrm{i} \hat S'_y\phi}\hat S'_x \mathrm{e} ^{- \mathrm{i} \hat S'_y\phi}&=-\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }\\
&=-\cos\phi\hat S_x+\sin \phi \hat S_y\\
&=\cos\phi \hat S'_x+\sin\phi \hat S'_z\\
\mathrm{e} ^{ \mathrm{i} \hat S'_y\phi}\hat S'_z \mathrm{e} ^{- \mathrm{i} \hat S'_y\phi}&=\mathrm e^{ \mathrm{i} \hat S_y\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }\\
&=\cos\phi\hat S_y+\sin\phi \hat S_x\\
&=\cos\phi \hat S'_z-\sin\phi\hat S'_x~.
~.
\end{aligned}
\end{equation}
因此期望值的变化为
\begin{equation}
\begin{pmatrix}\left\langle \hat S_{x}\right\rangle\\\left\langle \hat S_{y}\right\rangle\\\left\langle \hat S_{z}\right\rangle\end{pmatrix} \rightarrow \begin{pmatrix}\cos\phi&0&\sin\phi\\0&1&0\\-\sin\phi&0&\cos\phi\end{pmatrix} \begin{pmatrix}\left\langle \hat S_{x}\right\rangle\\\left\langle \hat S_{y}\right\rangle\\\left\langle \hat S_{z}\right\rangle\end{pmatrix} ~.
\end{equation}
同理可证 $x$ 轴的情况。因此,自旋态矢 “旋转” 与自旋期望值变化的关系为:
\begin{equation}
\left\lvert a \right\rangle \rightarrow \mathrm{e} ^{- \mathrm{i} \hat S_k\phi} \left\lvert a \right\rangle ,\quad \left\langle \hat S_{i}\right\rangle=\sum^{3}_{i=1}( \mathrm{e} ^{-\hat J_k\phi})^i_j\left\langle \hat S_{j}\right\rangle ~.
\end{equation}
自旋进动
假设电子处在 $z$ 轴指向的匀强磁场内,其自旋磁矩为总自旋 $ \boldsymbol{\mathbf{S}} $,质量为 $m$,则哈密顿算符为
\begin{equation}
\hat H=-\frac{e}{mc}\hat { \boldsymbol{\mathbf{S}} }\cdot { \boldsymbol{\mathbf{B}} }=-\frac{e}{mc}\hat S_zB_z\equiv \omega \hat S_z~,
\end{equation}
其中 $\omega=-\frac{e}{mc} B_z$。
以 $0$ 时刻作为初始时刻。显然,经历过若干时间 $t$ 后,时间演化算符为 $\hat U(t)= \mathrm{e} ^{- \mathrm{i} \hat H t}= \mathrm{e} ^{- \mathrm{i} \hat S_z\omega t}$,我们可以把这看作自旋态矢的特殊 “旋转”。用 $\omega t$ 代替上一节的 $\phi$ 便可得到期待值的演化。下标 $0$ 和 $t$ 分别代表初始时刻和 $t$ 时刻,则自旋演化为
\begin{equation}
\left\lvert a \right\rangle \rightarrow \mathrm{e} ^{- \mathrm{i} \hat S_k\omega t} \left\lvert a \right\rangle ,\quad \left\langle \hat S_{i}\right\rangle_t=\sum^{3}_{i=1}( \mathrm{e} ^{-\hat J_k\omega t})^i_j\left\langle \hat S_{j}\right\rangle_0 ~.
\end{equation}
致读者: 小时百科一直以来坚持所有内容免费无广告,这导致我们处于严重的亏损状态。 长此以往很可能会最终导致我们不得不选择大量广告以及内容付费等。 因此,我们请求广大读者
热心打赏 ,使网站得以健康发展。 如果看到这条信息的每位读者能慷慨打赏 20 元,我们一周就能脱离亏损, 并在接下来的一年里向所有读者继续免费提供优质内容。 但遗憾的是只有不到 1% 的读者愿意捐款, 他们的付出帮助了 99% 的读者免费获取知识, 我们在此表示感谢。