机械振动(高中)
贡献者: kahoyip; 叶月2_
物体或物体的一部分在某个位置附近所做的往复运动叫做机械振动,简称振动。
1. 简谐运动
由弹簧和小球组成的系统,叫做弹簧振子,有时也简称为振子。弹簧振子是一种理想模型,研究其运动时,小球被视为质点,并忽略弹簧的质量以及运动过程中的阻力。在弹簧振子的运动过程中,系统的机械能守恒。
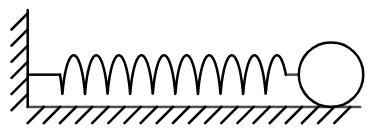
图 1 为安置在光滑水平面的弹簧振子,弹簧的一端被固定。弹簧处于自然状态时,小球静止,所受合力为零,此时小球所处的位置叫平衡位置。
当沿水平方向拉动(或推动)小球使其偏离平衡位置并释放,小球将在平衡位置的两侧做往复运动(振动)。振动过程中,小球在竖直方向上所受合力为零,在水平方向上受到弹簧弹力 $ \boldsymbol{\mathbf{F}} $ 的作用。弹力 $ \boldsymbol{\mathbf{F}} $ 的方向与偏离平衡位置的位移 $ \boldsymbol{\mathbf{x}} $ 的方向相反,总是指向平衡位置,其作用是将小球拉回平衡位置,这个力 $ \boldsymbol{\mathbf{F}} $ 叫做回复力。以图 1 向右为正方向,根据胡克定律可知:
物体在满足式 1 的回复力作用下发生的运动,叫做简谐运动(简谐振动),其位移与时间的关系遵循正弦或余弦函数的规律。简谐运动的位移—时间表达式为:
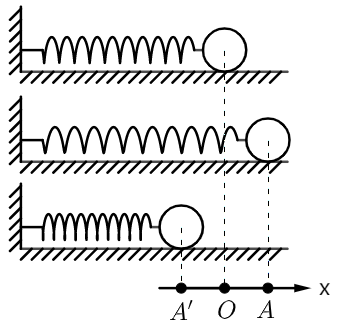
由式 2 可知简谐运动是一个周期性往复运动。振动物体经历 $A$→$O$→$A'$→$O$→$A$ 这样一个完整的振动过程,叫全振动。
| 过程或位置 | 各物理量的变化情况 |
| $A$ | $ \boldsymbol{\mathbf{x}} $ 向右,达最大值;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向左,达最大值;$E_k$ 为零,$E_p$ 达最大值 |
| $A$→$O$ | $ \boldsymbol{\mathbf{x}} $ 向右,减小;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向左,减小;$ \boldsymbol{\mathbf{v}} $ 向左,增大;$E_k$ 增大,$E_p$ 减小 |
| 首次经过 $O$ | $ \boldsymbol{\mathbf{x}} $、$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 为零;$ \boldsymbol{\mathbf{v}} $ 向左,达最大值;$E_k$ 达最大值,$E_p$ 为零 |
| $O$→$A'$ | $ \boldsymbol{\mathbf{x}} $ 向左,增大;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向右,增大;$ \boldsymbol{\mathbf{v}} $ 向左,减小;$E_k$ 减小,$E_p$ 增大 |
| $A'$ | $ \boldsymbol{\mathbf{x}} $ 向左,达最大值;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向右,达最大值;$E_k$ 为零,$E_p$ 达最大值 |
| $A'$→$O$ | $ \boldsymbol{\mathbf{x}} $ 向左,减小;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向右,减小;$ \boldsymbol{\mathbf{v}} $ 向右,增大;$E_k$ 增大,$E_p$ 减小 |
| 第二次经过 $O$ | $ \boldsymbol{\mathbf{x}} $、$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 为零;$ \boldsymbol{\mathbf{v}} $ 向右,达最大值;$E_k$ 达最大值,$E_p$ 为零 |
| $O$→$A$ | $ \boldsymbol{\mathbf{x}} $ 向右,增大;$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 向左,增大;$ \boldsymbol{\mathbf{v}} $ 向右,减小;$E_k$ 减小,$E_p$ 增大 |
$ \boldsymbol{\mathbf{x}} $ 为小球偏离平衡位置的位移,$ \boldsymbol{\mathbf{F}} $ 及 $ \boldsymbol{\mathbf{a}} $ 分别为小球所受回复力及加速度,$ \boldsymbol{\mathbf{v}} $ 为小球的运动速度,$E_k$ 和 $E_p$ 分别对应小球的动能和弹簧的势能。 假设物体在恢复力的作用下回到势能零点,结合胡克定律的图像可得弹性势能的表达式,即
我们可以进一步拓展简谐运动的模型,假设物体除了弹性恢复力外,还受到一个恒定的外力如 $F_0$,那么物体所受的合外力为
显然,作变量代换 $x'=x+x_0$ 后,我们可以得到新的位移-时间规律,即
在最大振幅处,物体所受的合力最大,因此可知在该处弹簧自然伸长。因此有
因为速度的定义依赖于相邻时刻的位移差,不随平衡位置的改变而改变,因此速度的表达式依旧与前例一致。
2. 匀速圆周运动和简谐运动的联系
质量为 $m$ 的质点绕点 $O$ 做半径为 $A$、角速度为 $\omega$ 的匀速圆周运动(图 4 ),$t=0$ 时质点与点 $O$ 的连线与 $x$ 轴的夹角为 $\varphi_0$。质点相对圆心 $O$ 的位移在 $x$ 轴上的投影为 $x=A \cos\left(\omega t + \varphi_0\right) $,可见做匀速圆周运动的质点在 $x$ 轴上的投影的运动是简谐运动。正是因为简谐振动和匀速圆周运动等价,每一个角速度和初相位联合对应唯一一个匀速圆周运动,所以这确实是 “简单”,“和谐” 的。
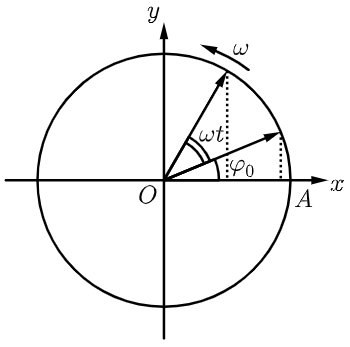
质点在上述匀速圆周运动的向心加速度大小为 $a=\omega^2 A$,向心加速度在 $x$ 轴的投影为 $a_x=-\omega^2 A \cos\left(\omega t + \varphi_0\right) $,即为简谐运动的加速度,则简谐运动的回复力可表示为
简谐运动的振动周期
3. 单摆
一根质量和伸缩量可以忽略不计的细绳(摆线),上端固定,下端系着一个看作质点的物体(摆球),就构成了一个单摆。单摆是实际摆的理想模型,摆球的运动是以摆线固定点为圆心的变速圆周运动,也是在平衡位置1两侧的周期性往复振动,运动过程中机械能守恒。
单摆运动时的受力分析如图 5 所示,摆球受到了重力和摆线拉力作用。摆线的拉力和摆球重力沿径向的分力的合力 $T-mg\cos\theta$ 提供了摆球做圆周运动的向心力,摆球重力沿圆弧切线方向的分力 $mg\sin\theta$ 提供了摆球振动的回复力。
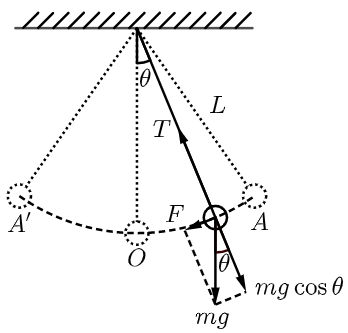
当摆角 $\theta$ 很小时,有 $\sin\theta \approx \theta$2,摆球的位移大小 $x$ 近似于 $L\theta$,可得回复力 $F \approx -mgx/L$,符合式 1 的形式,此时可把单摆的摆动近似看成简谐运动,将 $k=mg/L$ 代入式 10 可得单摆做简谐运动的周期为
4. 受迫振动和共振
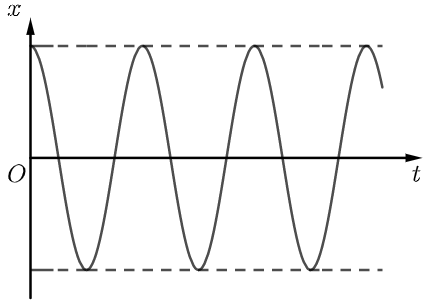
从上述内容可以知道,弹簧振子和单摆在不受外力时做简谐运动,其振动周期和频率只与自身的性质有关,这种振动系统不受外力的振动叫做固有振动,对应的振动频率叫做固有频率。
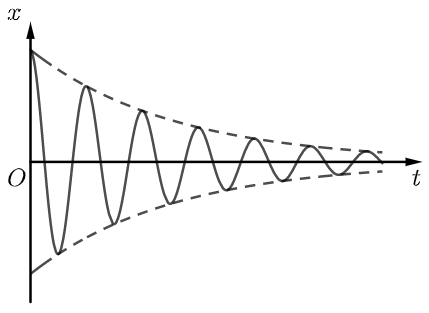
实际的振动会受到阻力的作用,系统因克服阻力做功而消耗机械能,振幅逐渐减小。振幅随时间减小的振动,叫做阻尼振动。阻尼越大,振幅减小得越快,当阻尼过大时,系统将不能发生振动。
在实际的振动中,为了保持振幅不变,我们通常会给系统施加一个周期性的外界驱动力,由于外界驱动力的作用,系统机械能得以补充,并持续振动。系统在周期性的外界驱动力作用下的振动,叫做受迫振动。当系统所做的受迫振动达稳定后,其振动频率等于驱动力的频率,与固有频率无关。
当驱动力的频率等于系统的固有频率时,系统所做受迫振动的振幅最大,这种现象叫做共振,如音叉共鸣实验所演示的就是声音的共振现象。
1. ^ 单摆自然悬挂时摆球的位置,单摆运动过程中的最低点
2. ^ 参考:小角极限(简明微积分)
友情链接: 超理论坛 | ©小时科技 保留一切权利