双摆的数值计算(Matlab)
贡献者: addis
- 本文处于草稿阶段。
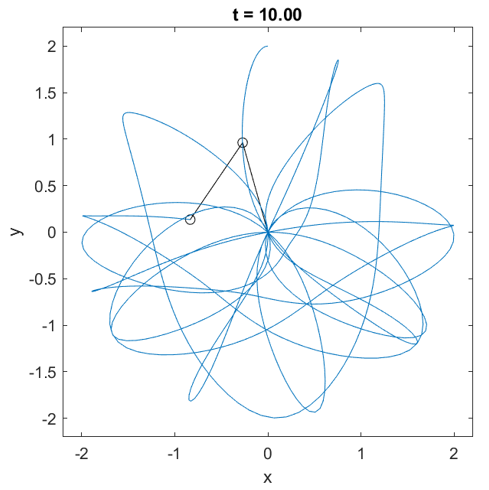
图 1:双摆的运行结果,蓝色曲线显示末端的轨迹。动画见这里。

图 2:刚体双摆的运行结果,蓝色曲线显示末端的轨迹。动画见这里。

图 3:图 2 的模拟是对照电影《钢铁侠 2》中的摆件制作的。
未完成:添加摩擦力
代码 1:double_pendulum.m
% 双摆运动
function double_pendulum
% === 参数设置 ===
m1 = 1; l1 = 1; % 摆 1
m2 = 1; l2 = 1; % 摆 2
th10 = pi; th20 = pi; % 初始角度
w10 = -4; w20 = 6; % 初始角速度
g = 9.8; % 重力加速度
tmin = 0; tmax = 10; Nt = 200; % 时间网格
Nsmooth = 4; % 轨迹平滑(每两帧之间轨迹的线段数)
RelTol = 1e-6; % 微分方程精度
% ==============
close all;
Y0 = [th10; th20; w10; w20];
options = odeset('RelTol',RelTol);
[T, Y] = ode45(@(t,Y)odefun(t, Y, m1, m2, l1, l2, g), ...
[tmin,tmax], Y0, options);
Th1 = Y(:,1); Th2 = Y(:,2); W1 = Y(:,3); W2 = Y(:,4);
Ek = 0.5*m1*(l1*W1).^2 + 0.5*m2*((l1*W1.*cos(Th1)+l2*W2.*cos(Th2)).^2 ...
+ (l1*W1.*sin(Th1) + l2*W2.*sin(Th2)).^2);
V = -m1*g*l1*cos(Th1) - m2*g*(l1*cos(Th1) + l2*cos(Th2));
figure; plot(T, Ek + V); xlabel time; title 'total energy';
t = linspace(tmin, tmax, Nt);
tt = linspace(tmin, tmax, Nsmooth*(Nt-1)+1);
th1 = interp1(T, Th1, t, 'spline');
thth1 = interp1(T, Th1, tt, 'spline');
th2 = interp1(T, Th2, t, 'spline');
thth2 = interp1(T, Th2, tt, 'spline');
x1 = l1*sin(th1); y1 = -l1*cos(th1);
xx1 = l1*sin(thth1); yy1 = -l1*cos(thth1);
x2 = x1 + l2*sin(th2); y2 = y1 - l2*cos(th2);
xx2 = xx1 + l2*sin(thth2); yy2 = yy1 - l2*cos(thth2);
figure;
for it = 1:Nt
clf;
plot([0, x1(it)], [0, y1(it)], 'k'); hold on;
scatter(x1(it), y1(it), 'k');
plot([x1(it), x2(it)], [y1(it), y2(it)], 'k');
scatter(x2(it), y2(it), 'k');
plot(xx2(1:Nsmooth*(it-1)+1), yy2(1:Nsmooth*(it-1)+1));
axis equal; axis([-1,1,-1,1]*(l1+l2)*1.1);
title(['t = ' num2str(t(it), '%.2f')]);
xlabel x; ylabel y;
saveas(gcf, [num2str(it) '.png']);
end
end
function dY = odefun(~, Y, m1, m2, l1, l2, g)
th1 = Y(1); th2 = Y(2); w1 = Y(3); w2 = Y(4);
alpha = th2 - th1;
dw1 = (m2*l2*sin(alpha)*w2^2 - (m1+m2)*g*sin(th1) ...
+ m2*(l1*sin(alpha)*w1^2+g*sin(th2))*cos(alpha))...
/(m1*l1+m2*l1*sin(alpha)^2);
dw2 = (((m1+m2)*g*sin(th1)-m2*l2*sin(alpha)*w2^2)*cos(alpha)...
- (m1+m2)*(l1*sin(alpha)*w1^2+g*sin(th2)))...
/(m1*l2 + m2*l2*sin(alpha)^2);
dY = [w1; w2; dw1; dw2];
end
1. 刚体双摆
未完成:从这里改出一个一般的拉格朗日方程数值解算器
代码 2:rigid_double_pendulum.m
% 刚体双摆
function rigid_double_pendulum
% === 参数设置 ===
L1 = 14.5; LL1 = 4; r1 = 3.6; alpha = pi;
L2 = 10.8; LL2 = 4.5;
th10 = 0; th20 = pi/2; % 初始角度
w10 = -1; w20 = 0; % 初始角速度
g = 9.8; % 重力加速度
tmin = 0; tmax = 50; Nt = 200; % 时间网格
Nsmooth = 4; % 轨迹平滑(每两帧之间轨迹的线段数)
% ==== 参数计算 ====
m1 = L1; l1 = L1/2-LL1; I1 = m1*L1^2/12;
m2 = L2; l2 = L2/2-LL2; I2 = m2*L2^2/12;
% ================
close all;
Y0 = [th10; th20; w10; w20];
options = odeset('RelTol',1e-6);
[T, Y] = ode45(@(t,Y)odefun(t, Y, m1, l1, I1, r1, alpha, m2, l2, I2, g), ...
[tmin,tmax], Y0, options);
Th1 = Y(:,1); Th2 = Y(:,2); W1 = Y(:,3); W2 = Y(:,4);
a = 0.5*(m1*l1^2 + m2*r1^2 + I1);
b = 0.5*(m2*l2^2 + I2);
c = m2*r1*l2*cos(Th1 + alpha - Th2);
Ek = a*W1.^2 + b*W2.^2 + c.*W1.*W2;
V = -m1*g*l1*cos(Th1) - m2*g*(r1*cos(Th1+alpha) + l2*cos(Th2));
figure; plot(T, Ek + V); xlabel time; title 'total energy';
t = linspace(tmin, tmax, Nt);
tt = linspace(tmin, tmax, Nsmooth*(Nt-1)+1);
th1 = interp1(T, Th1, t, 'spline');
thth1 = interp1(T, Th1, tt, 'spline');
th2 = interp1(T, Th2, t, 'spline');
thth2 = interp1(T, Th2, tt, 'spline');
x0 = -r1*sin(th1); y0 = r1*cos(th1);
xx0 = -r1*sin(thth1); yy0 = r1*cos(thth1);
x1 = -LL1*sin(th1); y1 = LL1*cos(th1);
x2 = (L1-LL1)*sin(th1); y2 = -(L1-LL1)*cos(th1);
x3 = x0-LL2*sin(th2); y3 = y0+LL2*cos(th2);
x4 = x0+(L2-LL2)*sin(th2); y4 = y0-(L2-LL2)*cos(th2);
xx4 = xx0+(L2-LL2)*sin(thth2); yy4 = yy0-(L2-LL2)*cos(thth2);
figure;
for it = 1:Nt
clf; scatter(0,0); hold on;
plot([x1(it), x2(it)], [y1(it), y2(it)], 'Color', 'k', 'LineWidth', 2);
plot([x3(it), x4(it)], [y3(it), y4(it)], 'Color', 'k', 'LineWidth', 2);
plot(xx4(1:Nsmooth*(it-1)+1), yy4(1:Nsmooth*(it-1)+1), 'g');
axis equal; axis([-1,1,-1,1]*(L1-LL1)*1.1);
title(['t = ' num2str(t(it), '%.2f')]);
xlabel x; ylabel y;
saveas(gcf, [num2str(it) '.png']);
end
end
function dY = odefun(~, Y, m1, l1, I1, r1, alpha, m2, l2, I2, g)
th1 = Y(1); th2 = Y(2); w1 = Y(3); w2 = Y(4);
a = 0.5*(m1*l1^2 + m2*r1^2 + I1);
b = 0.5*(m2*l2^2 + I2);
c = m2*r1*l2*cos(th1 + alpha - th2);
dcdth1 = -m2*r1*l2*sin(th1+alpha-th2);
dcdth2 = m2*r1*l2*sin(th1+alpha-th2);
dVdth1 = m1*g*l1*sin(th1) + m2*g*r1*sin(th1+alpha);
dVdth2 = m2*g*l2*sin(th2);
A = [2*a, c; c, 2*b]; detA = det(A);
B = -[dcdth2*w2^2 + dVdth1; dcdth1*w1^2 + dVdth2];
dw1 = det([B(1), c; B(2), 2*b])/detA;
dw2 = det([2*a, B(1); c, B(2)])/detA;
dY = [w1; w2; dw1; dw2];
end
致读者: 小时百科一直以来坚持所有内容免费无广告,这导致我们处于严重的亏损状态。 长此以往很可能会最终导致我们不得不选择大量广告以及内容付费等。 因此,我们请求广大读者热心打赏 ,使网站得以健康发展。 如果看到这条信息的每位读者能慷慨打赏 20 元,我们一周就能脱离亏损, 并在接下来的一年里向所有读者继续免费提供优质内容。 但遗憾的是只有不到 1% 的读者愿意捐款, 他们的付出帮助了 99% 的读者免费获取知识, 我们在此表示感谢。
友情链接: 超理论坛 | ©小时科技 保留一切权利