坐标定轴旋转程序(Matlab)
贡献者: addis
这里给出一个 Matlab 函数 turn() 可以一次把三维空间中若干点绕非零矢量 $ \boldsymbol{\mathbf{A}} $ 按照右手定则旋转角度 $\theta$。在程序中,这些点可以用任意形状的 X, Y, Z 数组来表示,也可以用单个三列的矩阵 $P$ 来表示(每列分别为 $x, y, z$ 坐标)。$ \boldsymbol{\mathbf{A}} $ 和 $\theta$ 既可以直接指定,也可以通过指定两个矢量 $ \boldsymbol{\mathbf{D}} _1, \boldsymbol{\mathbf{D}} _2$:$ \boldsymbol{\mathbf{A}} $ 垂直于 $ \boldsymbol{\mathbf{D}} _1, \boldsymbol{\mathbf{D}} _2$,且把 $ \boldsymbol{\mathbf{D}} _1$ 方向转到 $ \boldsymbol{\mathbf{D}} _2$ 方向。
使用示例:转动一个正方形

图 1:运行结果 1:绕 $z$ 轴转动
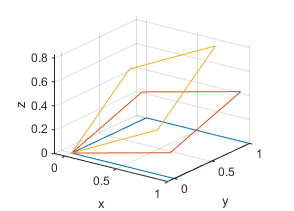
图 2:运行结果 2:绕 $(1,-1,0)$ 轴转动
代码 1:turn_demo.m
% turn_demo
A = [1,-1,0]; % [0, 0, 1]
X = [0,1,1,0,0]; Y = [0,0,1,1,0]; Z = [0,0,0,0,0];
figure; plot3(X, Y, Z);
grid on; hold on; axis equal;
xlabel x; ylabel y; zlabel z;
view(36,20);
[X1,Y1,Z1] = turn(X,Y,Z,A,pi/10);
[X2,Y2,Z2] = turn(X,Y,Z,A,pi/5);
plot3(X1, Y1, Z1);
plot3(X2, Y2, Z2);
代码 2:turn.m
% 格式 0
% [X1,Y1,Z1] = turn(X,Y,Z,A,theta) 把空间点绕原点以 A 方向为轴逆时针转动theta角
% [X1,Y1,Z1] = turn(X,Y,Z,D1,D2) 把空间点由 D1 方向绕原点转到 D2 方向
% numel(X) = numel(Y) = numel(Z)
% numel(D1) = numel(D2) = numel(A) = 3
% numel(theta) = 1
% 格式 1
% P1 = turn(P,A,theta) 把空间点绕原点以 A 方向为轴逆时针转动 theta 角
% P1 = turn(P,D1,D2) 把空间点由 D1 方向绕原点转到 D2 方向
% P, P1 的每行是一个点, size(P) = size(P1) = [N,3]
function [X1, Y1, Z1] = turn(X, Y, Z, A, theta)
% 格式检查
flag = 0; % flag = 0 表示格式 0, flag = 1 表示格式 1
if nargout == 1 && nargin == 3 % 格式检查
A = Y; theta = Z;
Y = X(:,2); Z = X(:,3); X = X(:,1);
flag = 1;
elseif numel(X) ~= numel(Y) || numel(Y) ~= numel(Z) %格式 0 要求 xyz 元素个数相同即可
error('numel of x, y, z is not equal')
end
if length(A(:)) ~= 3 % 两种格式都要求 A 是一个矢量
error('length A is not 3');
end
if numel(theta) == 3
D1 = A/norm(A);
D2 = theta/norm(theta);
A = cross(D1,D2);
C = dot(D1,D2);
S = sqrt(1-C^2);
elseif numel(theta) == 1
C = cos(theta);
S = sin(theta);
else
error('numel(theta)~=1 or numel(A2)~=3');
end
normA = sqrt(A(1)^2 + A(2)^2 + A(3)^2);
if normA == 0
X1 = X; Y1 = Y; Z1 = Z;
return;
end
A0 = A / normA;
Ax = A0(1); Ay = A0(2); Az = A0(3);
C1 = 1 - C;
M = ... % 见 https://wuli.wiki/changed/RotA.html
[
C1*Ax*Ax+C C1*Ax*Ay-Az*S C1*Ax*Az+Ay*S
C1*Ay*Ax+Az*S C1*Ay*Ay+C C1*Ay*Az-Ax*S
C1*Az*Ax-Ay*S C1*Az*Ay+Ax*S C1*Az*Az+C
];
XYZ1 = M*[X(:)';Y(:)';Z(:)'];
if flag == 0 % 原格式
X1 = zeros(size(X));
Y1 = zeros(size(Y));
Z1 = zeros(size(Z));
X1(:)=XYZ1(1,:);
Y1(:)=XYZ1(2,:);
Z1(:)=XYZ1(3,:);
else % 新格式
X1 = XYZ1';
Y1 = []; Z1 = [];
end
end
致读者: 小时百科一直以来坚持所有内容免费无广告,这导致我们处于严重的亏损状态。 长此以往很可能会最终导致我们不得不选择大量广告以及内容付费等。 因此,我们请求广大读者热心打赏 ,使网站得以健康发展。 如果看到这条信息的每位读者能慷慨打赏 20 元,我们一周就能脱离亏损, 并在接下来的一年里向所有读者继续免费提供优质内容。 但遗憾的是只有不到 1% 的读者愿意捐款, 他们的付出帮助了 99% 的读者免费获取知识, 我们在此表示感谢。
友情链接: 超理论坛 | ©小时科技 保留一切权利