位移与应变
贡献者: ACertainUser
- 本文存在未完成的内容。 应变协调方程
1 在应力中我们讨论了如何表示材料中各处的受力,现在我们讨论如何表示材料中各处的变形。此处我们只探讨小变形的情况,即材料变形的程度非常轻微。
1. 位移


材料变形后,材料中每一点都移动了。例如,原先位于 $ \boldsymbol{\mathbf{x}} _0$ 的点在变形后运动到了 $ \boldsymbol{\mathbf{a}} _0$ 位置,原先位于 $ \boldsymbol{\mathbf{x}} _1$ 的点运动到了 $ \boldsymbol{\mathbf{a}} _1$ 位置...如果我们在弹性力学中暂且假定 “变形前后,原先的一个点不会分裂为两个,也不会有两个点合并为一个”,那么我们就可以在点变形前的位置 $ \boldsymbol{\mathbf{x}} $ 与变形后的位置 $ \boldsymbol{\mathbf{a}} $ 之间建立一种映射$$ \boldsymbol{\mathbf{x}} \rightarrow \boldsymbol{\mathbf{a}} ~,$$亦即定义一个函数。$$ \boldsymbol{\mathbf{a}} = \boldsymbol{\mathbf{a}} ( \boldsymbol{\mathbf{x}} )~.$$
位移函数
为了更好地表示 $ \boldsymbol{\mathbf{x}} $ 处点位置的变化,我们定义位移函数
$ \boldsymbol{\mathbf{u}} $ 是一个矢量函数,也被称为位移场。它的 3 个分量都是关于点坐标的函数,分别表示点在 $x_1, x_2, x_3$2各方向上的位移。 $$ \boldsymbol{\mathbf{u}} ( \boldsymbol{\mathbf{x}} ) = \begin{pmatrix} u_1( \boldsymbol{\mathbf{x}} )\\ u_2( \boldsymbol{\mathbf{x}} )\\ u_3( \boldsymbol{\mathbf{x}} )\\ \end{pmatrix} = \begin{pmatrix} u_1(x_1, x_2, x_3)\\ u_2(x_1, x_2, x_3)\\ u_3(x_1, x_2, x_3)\\ \end{pmatrix}~. $$ 由于变形前后点不合并、分裂的性质,$ \boldsymbol{\mathbf{u}} ( \boldsymbol{\mathbf{x}} )$ 是一个 “好函数”,单值、连续且多阶可导。
2. 应变
有时我们使用应变$\varepsilon$ 来描述材料的变形。类似于应力,应变也定义在材料中的每一个微元处,可记为一个 $3\times3$ 的矩阵(二阶张量).应变矩阵也是对称矩阵 $\varepsilon=\varepsilon^T$,有 $6$ 个独立变量。
应变角标的含义与应力的类似,第一个角标表示面的法方向,第二个角标表示变形的方向。我们可将应变分为两类,正应变(两角标相同)与切应变(两角标不同)。
正应变
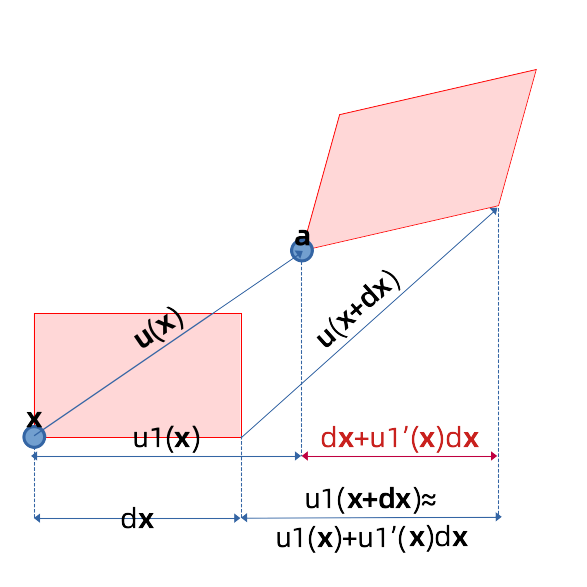
正应变与微元的长度变化有关。如图 3 所示,$x_1$ 方向上,微元的原本长度为 $l_0 = \,\mathrm{d}{x} _1$,变形后长度为 $ l = \,\mathrm{d}{x} _1+ \frac{\partial u_1}{\partial x_1} \,\mathrm{d}{x} _1$,长度变化 $\Delta l = l-l_0 = \frac{\partial u_1}{\partial x_1} \,\mathrm{d}{x} _1$,那么定义正应变
切应变
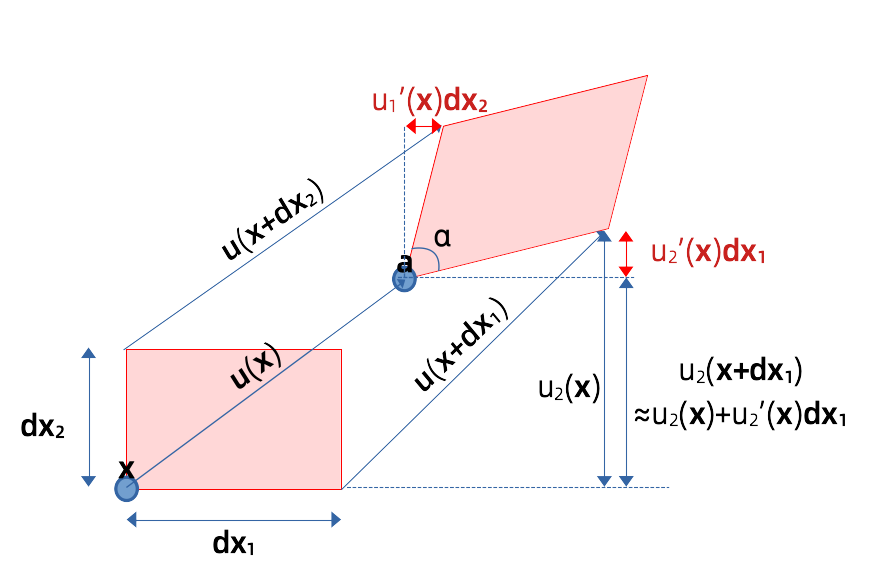
而切应变与微元的角度变化有关。如图 4 所示,定义切应变
3. 应变几何方程
推广上一节的结论,我们共可以得到 $6$ 个联系应变与位移的独立方程。这 $6$ 个方程被称为应变几何方程。
4. 应变协调方程
5. 画廊:经典的应变类型
图中黑色为原微元体,红色为变形后的微元体。





6. 附录:应变模拟器
用以绘制上述应变示意图的 Matlab 代码
%定义位移函数,你可以设置自己的线性位移函数
u1 = @(x,y,z) -0.2*x + 0.2*y;
u2 = @(x,y,z) 0;
u3 = @(x,y,z) 0;
A(1,:)=[0,0,0];
A(2,:)=[1,0,0];
A(3,:)=[1,1,0];
A(4,:)=[0,1,0];
A(5,:)=[0,1,1];
A(6,:)=[0,0,1];
A(7,:)=[1,0,1];
A(8,:)=[1,1,1];
hold on
axis equal
%绘制顶点
%for i = 1:8
% scatter3(A(i,1),A(i,2),A(i,3),'k');
%endfor
view(-30,60)
xlabel('Axis 1','fontsize',15)
ylabel('Axis 2','fontsize',15)
zlabel('Axis 3','fontsize',15)
line([A(1,1), A(2,1)],[A(1,2), A(2,2)],[A(1,3), A(2,3)],'color','k');
line([A(1,1), A(4,1)],[A(1,2), A(4,2)],[A(1,3), A(4,3)],'color','k');
line([A(1,1), A(6,1)],[A(1,2), A(6,2)],[A(1,3), A(6,3)],'color','k');
line([A(2,1), A(7,1)],[A(2,2), A(7,2)],[A(2,3), A(7,3)],'color','k');
line([A(2,1), A(3,1)],[A(2,2), A(3,2)],[A(2,3), A(3,3)],'color','k');
line([A(3,1), A(4,1)],[A(3,2), A(4,2)],[A(3,3), A(4,3)],'color','k');
line([A(3,1), A(8,1)],[A(3,2), A(8,2)],[A(3,3), A(8,3)],'color','k');
line([A(4,1), A(5,1)],[A(4,2), A(5,2)],[A(4,3), A(5,3)],'color','k');
line([A(6,1), A(5,1)],[A(6,2), A(5,2)],[A(6,3), A(5,3)],'color','k');
line([A(6,1), A(7,1)],[A(6,2), A(7,2)],[A(6,3), A(7,3)],'color','k');
line([A(8,1), A(5,1)],[A(8,2), A(5,2)],[A(8,3), A(5,3)],'color','k');
line([A(8,1), A(7,1)],[A(8,2), A(7,2)],[A(8,3), A(7,3)],'color','k');
for i = 1:8
B(i,1) = u1(A(i,1),A(i,2),A(i,3))+A(i,1);
B(i,2) = u2(A(i,1),A(i,2),A(i,3))+A(i,2);
B(i,3) = u3(A(i,1),A(i,2),A(i,3))+A(i,3);
endfor
%for i = 1:8
% scatter3(B(i,1),B(i,2),B(i,3),'r');
%endfor
line([B(1,1), B(2,1)],[B(1,2), B(2,2)],[B(1,3), B(2,3)],'color','r');
line([B(1,1), B(4,1)],[B(1,2), B(4,2)],[B(1,3), B(4,3)],'color','r');
line([B(1,1), B(6,1)],[B(1,2), B(6,2)],[B(1,3), B(6,3)],'color','r');
line([B(2,1), B(7,1)],[B(2,2), B(7,2)],[B(2,3), B(7,3)],'color','r');
line([B(2,1), B(3,1)],[B(2,2), B(3,2)],[B(2,3), B(3,3)],'color','r');
line([B(3,1), B(4,1)],[B(3,2), B(4,2)],[B(3,3), B(4,3)],'color','r');
line([B(3,1), B(8,1)],[B(3,2), B(8,2)],[B(3,3), B(8,3)],'color','r');
line([B(4,1), B(5,1)],[B(4,2), B(5,2)],[B(4,3), B(5,3)],'color','r');
line([B(6,1), B(5,1)],[B(6,2), B(5,2)],[B(6,3), B(5,3)],'color','r');
line([B(6,1), B(7,1)],[B(6,2), B(7,2)],[B(6,3), B(7,3)],'color','r');
line([B(8,1), B(5,1)],[B(8,2), B(5,2)],[B(8,3), B(5,3)],'color','r');
line([B(8,1), B(7,1)],[B(8,2), B(7,2)],[B(8,3), B(7,3)],'color','r');
另一个以点阵代替正方体的实现的 Matlab 代码:
clc
clear
function s = SHPERE(x,y,z,r)
[X,Y,Z] = sphere(50);
X = r*X+x;
Y = r*Y+y;
Z = r*Z+z;
s = surf(X,Y,Z);
end
u1 = @(x,y,z) 0.2*y;
u2 = @(x,y,z) -0.05*y;
u3 = @(x,y,z) 0;
hold on
axis equal
for x = 0:3
for y = 0:3
for z = 0:3
a = u1(x,y,z)+x;
b = u2(x,y,z)+y;
c = u3(x,y,z)+z;
SPHERE(a,b,c,0.5);
end
end
end
1. ^ 本文参考了冯西桥的《弹性力学》课程与陆明万的《弹性理论基础》
2. ^ 为了方便表示,以 $x_1, x_2, x_3$ 轴代指 $x,y,z$ 轴