洛伦兹吸引子
贡献者: shizy0808; addis
1. 洛伦兹方程
120 世纪 60 年代,蓬勃发展的计算机技术开始得到广泛应用,其中包括长期天气预报。大气与液体同属流体,太阳照射使地面升温,靠近地面的气体受到加热,而高层大气还是冷的,于是上、下层气体之间将会出现对流,产生类似于贝纳德实验中的对流现象。在美国气象局工作的数学家洛伦兹(E.N. Lorenz)将大气对流与贝纳德液体对流联系起来,企图用数值方法进行长期天气预报。从贝纳德对流出发,利用流体力学中的纳维叶-斯托克斯(Navier-Stokes)方程、热传导方程和连续性方程,洛伦兹推导出了描述大气对流的微分方程
\begin{align}
& \frac{\mathrm{d}{x}}{\mathrm{d}{t}} =-\sigma (x-y)~,\\
& \frac{\mathrm{d}{y}}{\mathrm{d}{t}} =rx-y-xz~,\\
& \frac{\mathrm{d}{z}}{\mathrm{d}{t}} =-bz+xy~.
\end{align}
洛伦兹方程是一个能量耗散系统,这可以从它的相空间随时间变化的特性来证明。设在 $(x,y, z)$ 三维相空间取一个闭合曲面,该曲面所包围的体积 $V$ 随时间的变化为:
\begin{align}
\frac{\mathrm{d}{V}}{\mathrm{d}{t}} =\int_V \Big( \frac{\mathrm{d}{\dot{x}}}{\mathrm{d}{t}} + \frac{\mathrm{d}{\dot{y}}}{\mathrm{d}{t}} + \frac{\mathrm{d}{\dot{z}}}{\mathrm{d}{t}} \Big)~,
\end{align}
\begin{align}
& \frac{\mathrm{d}{\dot{x}}}{\mathrm{d}{t}} =-\sigma~,\\
& \frac{\mathrm{d}{\dot{y}}}{\mathrm{d}{t}} =-1~,\\
& \frac{\mathrm{d}{\dot{z}}}{\mathrm{d}{t}} =-b~,
\end{align}
\begin{align}
\frac{\mathrm{d}{V}}{\mathrm{d}{t}} =-(\sigma+1+b)V~.
\end{align}
\begin{align}
V(t)=V_0 \exp\left[-(\sigma+1+b)t\right] ~,
\end{align}
2. 洛伦兹方程解的分岔
由 $\dot{x}=\dot{y}=\dot{z}=0$ 可得洛伦兹方程的三个平衡点:
\begin{align}
x=y=z=0~,\qquad x=y=\pm\sqrt{b(r-1)}~, z=r-1~.
\end{align}
\begin{align}
\left(\begin{array}{l}
\dot{x} \\
\dot{y} \\
\dot{z}
\end{array}\right)=\left(\begin{array}{ccc}
-\sigma & \sigma & 0 \\
r-z & -1 & -x \\
y & x & -b
\end{array}\right)\left(\begin{array}{l}
x \\
y \\
z
\end{array}\right)~.
\end{align}
\begin{align}
\left(\begin{array}{l}
\dot{x}_{0} \\
\dot{y}_{0} \\
\dot{z}_{0}
\end{array}\right)=\left(\begin{array}{ccc}
-\sigma & \sigma & 0 \\
r & -1 & 0 \\
0 & 0 & -b
\end{array}\right)\left(\begin{array}{l}
x_{0} \\
y_{0} \\
z_{0}
\end{array}\right)~.
\end{align}
\begin{align}
\lambda_{1.2}=\frac{1}{2}\left[-(\sigma+1) \pm \sqrt{(\sigma-1)^{2}+4 \sigma r}\right]~, \quad \lambda_{3}=-b~.
\end{align}
3. 吸引子
由于洛伦兹方程混沌的特点,即对初值非常敏感。如今,这一方程组已成为混沌理论的经典,也是 “巴西蝴蝶扇动翅膀在美国引起德克萨斯的飓风” 一说的肇始。下面几幅图给出了初值稍微变化一点点最终导致完全不同的动力学轨迹的图像。
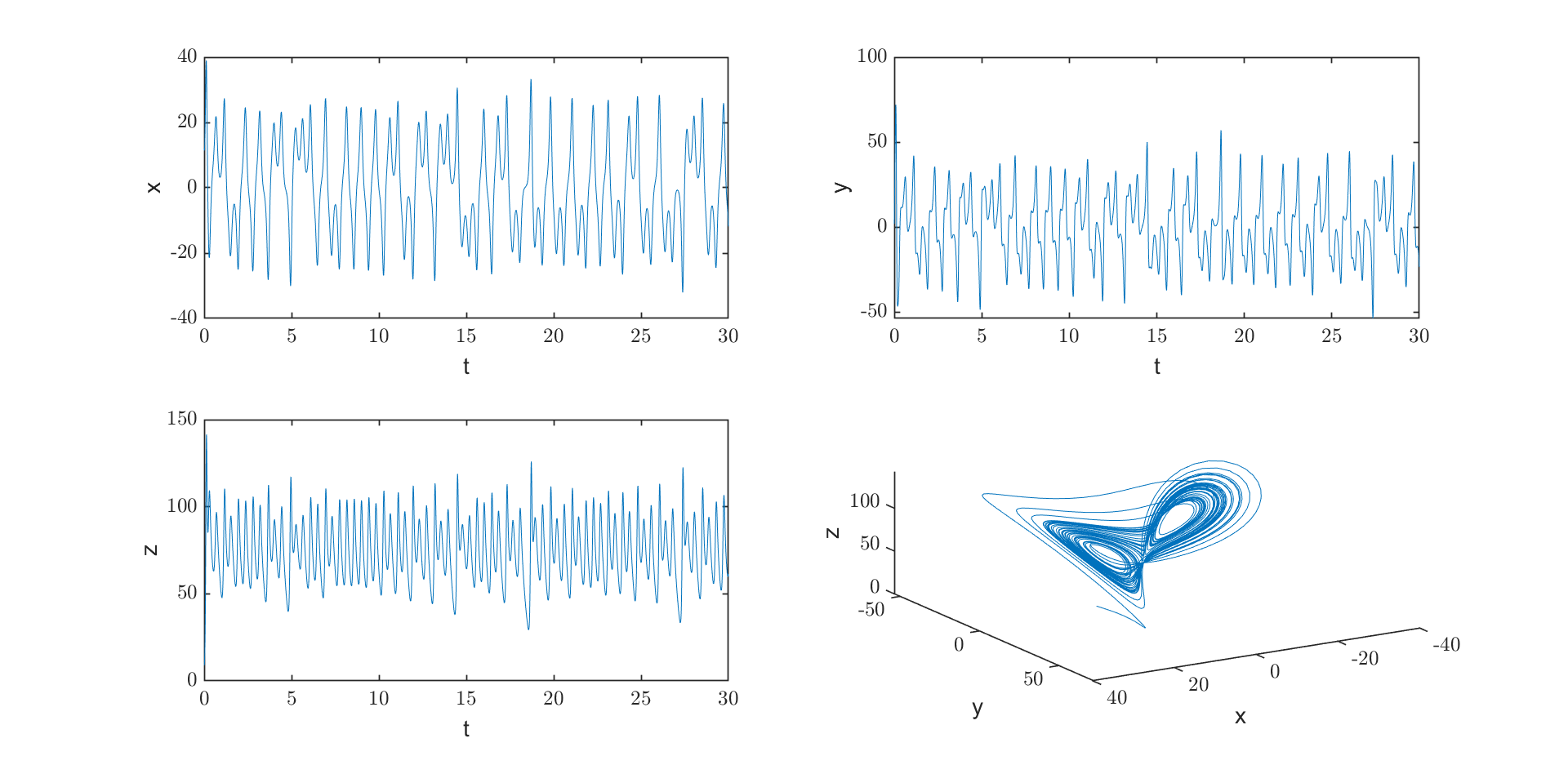
图 1:吸引子. 参数取值 $\sigma=10,b=8/3, r=80$. 初始条件:$(x_0,y_0,z_0)=(12,2,9)$

图 2:吸引子. 参数取值 $\sigma=10,b=8/3, r=80$. 初始条件:蓝线 $(x_0,y_0,z_0)=(12,2,9)$ 以及红线 $(x_0,y_0,z_0)=(12,2,9).1$。
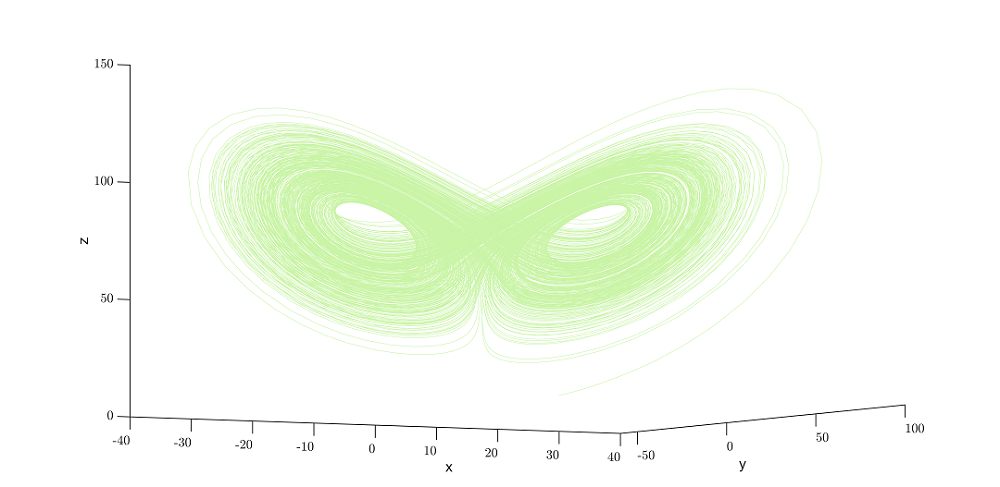
图 3:三维吸引子。
代码 1:lorenz.m
clear all
clc
clf
r = 80;
[t,y]=ode45(@Lorenz,[0,30],[12,2,9],[],r);
[t1,y1]=ode45(@Lorenz,[0,30],[12,2,9.1],[],r);
subplot(221);
plot(t,y(:,1),'b--');
hold on
plot(t1,y1(:,1),'g-.');
legend('z_0=9', 'z_0=9.1')
xlabel('t')
ylabel('x')
set(gca,'linewidth',1,'fontsize',15,'TickLabelInterpreter','latex')
subplot(222);
plot(t,y(:,2),'b--');
hold on
plot(t1,y1(:,2),'g-.');
legend('z_0=9', 'z_0=9.1')
xlabel('t')
ylabel('y')
set(gca,'linewidth',1,'fontsize',15,'TickLabelInterpreter','latex')
subplot(223);
plot(t,y(:,3),'b--');
hold on
plot(t1,y1(:,3),'g-.');
legend('z_0=9', 'z_0=9.1')
xlabel('t')
ylabel('z')
set(gca,'linewidth',1,'fontsize',15,'TickLabelInterpreter','latex')
subplot(224);
plot3(y(:,1),y(:,2),y(:,3),'b--');
hold on
plot3(y1(:,1),y2(:,2),y3(:,3),'g-.');
legend('z_0=9', 'z_0=9.1')
view([45 42]);
xlabel('x')
ylabel('y')
zlabel('z')
set(gca,'linewidth',1,'fontsize',15,'TickLabelInterpreter','latex')
function dy=Lorenz(t,y,r) %
dy=zeros(3,1);
dy(1)=10*(-y(1)+y(2));
dy(2)=r*y(1)-y(2)-y(1)*y(3);
dy(3)=y(1)*y(2)-8*y(3)/3;
end
致读者: 小时百科一直以来坚持所有内容免费无广告,这导致我们处于严重的亏损状态。 长此以往很可能会最终导致我们不得不选择大量广告以及内容付费等。 因此,我们请求广大读者热心打赏 ,使网站得以健康发展。 如果看到这条信息的每位读者能慷慨打赏 20 元,我们一周就能脱离亏损, 并在接下来的一年里向所有读者继续免费提供优质内容。 但遗憾的是只有不到 1% 的读者愿意捐款, 他们的付出帮助了 99% 的读者免费获取知识, 我们在此表示感谢。
友情链接: 超理论坛 | ©小时科技 保留一切权利