贡献者: 叶月2_; addis
预备知识 1 轨道角动量(量子力学),旋转算符
,自旋角动量
1. 空间转动与角动量生成元
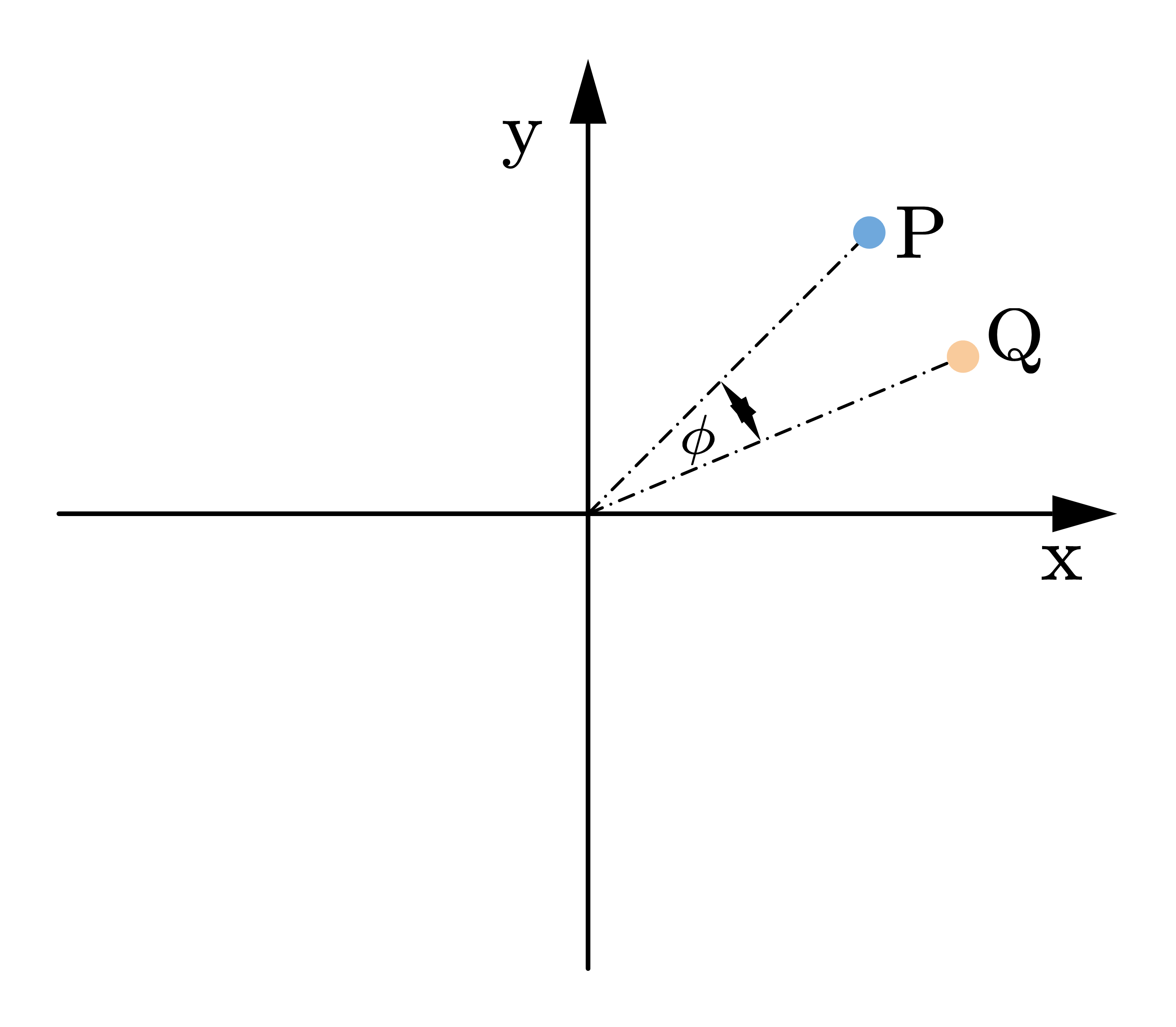
在物理里,常有系统 “主动旋转” 与坐标系 “被动旋转” 之分。如下图所示,系统 $P$ 和附着在坐标系上的 $Q$ 点到原点的距离相同。因此,若系统要到达 $Q$ 点,可以绕原点顺时针转动 $\phi$ 角,或者坐标系逆时针转动 $\phi$。
图 1
以右手定则确定 $z$ 轴,现在我们逆时针转动系统 $P$,角度为 $\phi$。设原坐标为 $ \boldsymbol{\mathbf{v}} =a \boldsymbol{\mathbf{i}} +b \boldsymbol{\mathbf{j}} +c \boldsymbol{\mathbf{k}} $,新坐标为 $ \boldsymbol{\mathbf{v'}} =a \boldsymbol{\mathbf{i'}} +b \boldsymbol{\mathbf{j'}} +c \boldsymbol{\mathbf{k}} $。稍加计算可知 $ \boldsymbol{\mathbf{i'}} = \begin{pmatrix}\cos \phi &\sin {\phi}\end{pmatrix} ^T, \boldsymbol{\mathbf{j'}} = \begin{pmatrix}-\sin \phi &\cos {\phi}\end{pmatrix} ^T$。所以
\begin{equation}
\boldsymbol{\mathbf{v'}} \equiv R_z(\phi) \boldsymbol{\mathbf{v}} = \begin{pmatrix}\cos\phi&-\sin\phi&0\\\sin\phi&\cos \phi&0\\0&0&1\end{pmatrix} \boldsymbol{\mathbf{v}} ~,
\end{equation}
同理可得
\begin{equation}
R_x(\phi)= \begin{pmatrix}1&0&0\\0&\cos\phi&-\sin\phi\\0&\sin\phi&\cos\phi\end{pmatrix} ,R_y(\phi)= \begin{pmatrix}\cos\phi&0&\sin\phi\\0&1&0\\-\sin\phi&0&\cos\phi\end{pmatrix} ~.
\end{equation}
设绕 $x,y,z$ 轴转动的生成元分别为 $J_x,J_y,J_z$,满足 $ \mathrm{e} ^{- \mathrm{i} J_i\phi}=R_i(\phi)$,则可计算得到三个生成元分别为:
\begin{equation}
\begin{aligned}
J_x&= \mathrm{i} \frac{\mathrm{d}{R_x(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&0&0\\0&0&-1\\0&1&0\end{pmatrix} \\
J_y&= \mathrm{i} \frac{\mathrm{d}{R_y(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&0&1\\0&0&0\\-1&0&0\end{pmatrix} \\
J_z&= \mathrm{i} \frac{\mathrm{d}{R_z(\phi)}}{\mathrm{d}{\phi}} |_{\phi=0}= \mathrm{i} \begin{pmatrix}0&-1&0\\1&0&0\\0&0&0\end{pmatrix} ~.
\end{aligned}
\end{equation}
读者可验证,生成元满足对易关系 $[J_i,J_j]= \mathrm{i} \epsilon_{ijk}J_k$,与量子力学的角动量算符对易关系相同。
2. 自旋态矢的 “转动”
未完成:修改旋转算符一节或者合并
从式 7 可知,轨道角动量算符的 $ \mathrm{e} $ 指数关系($ \mathrm{e} ^{- \mathrm{i} \hat L_i\phi/\hbar}$)可以诱导波函数绕 $i$ 轴逆时针转动 $\phi$ 角。于是很自然的一个猜想是:自旋角动量算符是否可以诱导自旋部分的态矢 “转动”?尽管这并非是空间转动,但满足 “旋转” 后的态矢模方不变。
现在我们利用四元数来证明这一点。已知单位四元数 $Q\cong SU(2)$,设线性同构映射 $f$ 为:
\begin{equation}
1\rightarrow \begin{pmatrix}1&0\\0&1\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{i}}} \rightarrow- \mathrm{i} \sigma_1=- \mathrm{i} \begin{pmatrix}0&1\\1&0\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{j}}} \rightarrow - \mathrm{i} \sigma_2=- \mathrm{i} \begin{pmatrix}0&- \mathrm{i} \\ \mathrm{i} &0\end{pmatrix} ~, \hat{\boldsymbol{\mathbf{k}}} \rightarrow - \mathrm{i} \sigma_3=- \mathrm{i} \begin{pmatrix}1&0\\0&-1\end{pmatrix} ~.
\end{equation}
设 $q$ 为任意四元数,则
\begin{equation}
\begin{aligned}
f(q)&=f( \cos\left(\frac{\phi}{2}\right) + \hat{\boldsymbol{\mathbf{k}}} \sin\frac{\phi}{2})\\
&= \begin{pmatrix} \cos\left(\frac{\phi}{2}\right) - \mathrm{i} \sin\left(\frac{\phi}{2}\right) &0\\0& \cos\left(\frac{\phi}{2}\right) + \mathrm{i} \sin\left(\frac{\phi}{2}\right) \end{pmatrix} \equiv \mathrm{e} ^{- \mathrm{i} \hat S_z \phi /\hbar}~,
\end{aligned}
\end{equation}
解得生成元为
\begin{equation}
\hat S_z= \mathrm{i} \hbar \frac{\mathrm{d}{f(q)}}{\mathrm{d}{\phi}} |_{\phi=0}=\frac{\hbar}{2} \begin{pmatrix}1&0\\0&-1\end{pmatrix} ~,
\end{equation}
确实是我们熟知的 $\hat S_z$。同理,用 $ \hat{\boldsymbol{\mathbf{j}}} , \hat{\boldsymbol{\mathbf{i}}} $ 代替 $ \hat{\boldsymbol{\mathbf{k}}} $,可以推导得到 $\hat S_y,\hat S_x$,也是 $\hat S_z$ 表象下的自旋角动量分量形式。因此 $\hat S_x,\hat S_y,\hat S_z$ 是 $SU(2)$ 的生成元,可以诱导对复二维列向量的特殊酉变换。
由上述旋转算符的幺正性可知,特殊酉变换对自旋态矢作用后能保总概率密度不变,然而这和空间旋转不是等价的,因为周期性不同。以式 5 为例,可知当 $\phi=4\pi$ 时,才对应恒等变换,才能让自旋态矢复位。而对于式 1 ,$\phi=2\pi$ 即可让空间向量复位。
习题 1
设系统态矢为 $ \left\lvert \beta \right\rangle = \begin{pmatrix}a^1&a^2\end{pmatrix} ^T$。如果系统 “绕 $z$ 轴转动 $\phi$”,写出转动后的态矢。
自旋期望值的 “旋转”
为方便计,本节采取约定 $\hbar=1$。
以自旋 $1/2$ 的粒子为例,其自旋期望值为 $(\left\langle \hat S_{x}\right\rangle,\left\langle \hat S_{y}\right\rangle,\left\langle \hat S_{z}\right\rangle)$。设该粒子的初始态矢为 $ \left\lvert a \right\rangle $,态矢绕 $z$ 轴 “转动” 后变为 $\mathrm e^{- \mathrm{i} \hat S_z\phi} \left\lvert a \right\rangle $。
则期望值变化为:
\begin{equation}
\left\langle a \right\rvert \hat S_i \left\lvert a \right\rangle \rightarrow \left\langle a \right\rvert \mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_i\mathrm e^{- \mathrm{i} \hat S_z\phi} \left\lvert a \right\rangle ~.
\end{equation}
在 $\hat S_z$ 表象下计算 $\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }$ 得:
\begin{equation}
\begin{aligned}
\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi}&=\mathrm e^{ \mathrm{i} \hat S_z\phi}\left(\frac{1}{2}( \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert )\right)\mathrm e^{- \mathrm{i} \hat S_z\phi}\\
&=\frac{1}{2}\left(\mathrm e^{-\mathrm i t} \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert \mathrm e^{\mathrm i t}\right)\\
&=\frac{1}{2}\left[ \cos\left(\phi\right) ( \left\lvert - \right\rangle \left\langle + \right\rvert + \left\lvert + \right\rangle \left\langle - \right\rvert )+\mathrm i \sin\left(\phi\right) ( \left\lvert + \right\rangle \left\langle - \right\rvert - \left\lvert - \right\rangle \left\langle + \right\rvert )\right]\\
&= \cos\left(\phi\right) \hat S_x- \sin\left(\phi\right) \hat S_y~.
\end{aligned}
\end{equation}
因此,$\hat S_x$ 的期望值变化为:
\begin{equation}
\left\langle \hat S_{x}\right\rangle\rightarrow \left\langle \hat S_{x}\right\rangle \cos\left(\phi\right) -\left\langle \hat S_{y}\right\rangle \sin\left(\phi\right) ~.
\end{equation}
同理可以计算出其他分量的期望值变化:
\begin{equation}
\left\langle \hat S_{y}\right\rangle\rightarrow \left\langle \hat S_{y}\right\rangle \cos\left(\phi\right) +\left\langle \hat S_{x}\right\rangle \sin\left(\phi\right) ~,
\end{equation}
\begin{equation}
\left\langle \hat S_{z}\right\rangle\rightarrow \left\langle \hat S_{z}\right\rangle~.
\end{equation}
因此,自旋期望值可看作经典矢量,态矢绕自旋 $z$ 分量 “旋转” 相当于该矢量绕 $z$ 轴 “旋转”:
\begin{equation}
\begin{pmatrix}
\cos\left(\phi\right) &- \sin\left(\phi\right) &0 \\
\sin\left(\phi\right) & \cos\left(\phi\right) & 0\\
0& 0 &1
\end{pmatrix}
\begin{pmatrix}
\left\langle \hat S_{x}\right\rangle\\
\left\langle \hat S_{y}\right\rangle\\
\left\langle \hat S_{z}\right\rangle
\end{pmatrix}
=
\begin{pmatrix}
\overline{\hat S'_x}\\
\overline{\hat S'_y}\\
\overline{\hat S'_z}
\end{pmatrix}~.
\end{equation}
若态矢绕 $y$ 轴旋转 $\phi$,为计算方便,我们在 $\hat S_y$ 表象下讨论。因为自旋三分量的本征值相同,所以在新表象下,$\hat S'_y=S_z$。设过渡矩阵为 $U$,则
\begin{equation}
\begin{aligned}
\hat S'_y &=U^{\dagger}\hat S_yU=\hat S_z\\
\hat S'_z&=U^{\dagger}\hat S_z U=\hat S_y~.
\end{aligned}
\end{equation}
则 $[\hat S'_y,\hat S'_z]= \mathrm{i} \hat S'_x=[\hat S_z,\hat S_y]=- \mathrm{i} \hat S_x$,所以 $\hat S'_x=- \hat S_x$。
于是
\begin{equation}
\begin{aligned}
\mathrm{e} ^{ \mathrm{i} \hat S'_y\phi}\hat S'_x \mathrm{e} ^{- \mathrm{i} \hat S'_y\phi}&=-\mathrm e^{ \mathrm{i} \hat S_z\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }\\
&=-\cos\phi\hat S_x+\sin \phi \hat S_y\\
&=\cos\phi \hat S'_x+\sin\phi \hat S'_z\\
\mathrm{e} ^{ \mathrm{i} \hat S'_y\phi}\hat S'_z \mathrm{e} ^{- \mathrm{i} \hat S'_y\phi}&=\mathrm e^{ \mathrm{i} \hat S_y\phi}\hat S_x\mathrm e^{- \mathrm{i} \hat S_z\phi }\\
&=\cos\phi\hat S_y+\sin\phi \hat S_x\\
&=\cos\phi \hat S'_z-\sin\phi\hat S'_x~.
~.
\end{aligned}
\end{equation}
因此期望值的变化为
\begin{equation}
\begin{pmatrix}\left\langle \hat S_{x}\right\rangle\\\left\langle \hat S_{y}\right\rangle\\\left\langle \hat S_{z}\right\rangle\end{pmatrix} \rightarrow \begin{pmatrix}\cos\phi&0&\sin\phi\\0&1&0\\-\sin\phi&0&\cos\phi\end{pmatrix} \begin{pmatrix}\left\langle \hat S_{x}\right\rangle\\\left\langle \hat S_{y}\right\rangle\\\left\langle \hat S_{z}\right\rangle\end{pmatrix} ~.
\end{equation}
同理可证 $x$ 轴的情况。因此,自旋态矢 “旋转” 与自旋期望值变化的关系为:
\begin{equation}
\left\lvert a \right\rangle \rightarrow \mathrm{e} ^{- \mathrm{i} \hat S_k\phi} \left\lvert a \right\rangle ,\quad \left\langle \hat S_{i}\right\rangle=\sum^{3}_{i=1}( \mathrm{e} ^{-\hat J_k\phi})^i_j\left\langle \hat S_{j}\right\rangle ~.
\end{equation}
自旋进动
假设电子处在 $z$ 轴指向的匀强磁场内,其自旋磁矩为总自旋 $ \boldsymbol{\mathbf{S}} $,质量为 $m$,则哈密顿算符为
\begin{equation}
\hat H=-\frac{e}{mc}\hat { \boldsymbol{\mathbf{S}} }\cdot { \boldsymbol{\mathbf{B}} }=-\frac{e}{mc}\hat S_zB_z\equiv \omega \hat S_z~,
\end{equation}
其中 $\omega=-\frac{e}{mc} B_z$。
以 $0$ 时刻作为初始时刻。显然,经历过若干时间 $t$ 后,时间演化算符为 $\hat U(t)= \mathrm{e} ^{- \mathrm{i} \hat H t}= \mathrm{e} ^{- \mathrm{i} \hat S_z\omega t}$,我们可以把这看作自旋态矢的特殊 “旋转”。用 $\omega t$ 代替上一节的 $\phi$ 便可得到期待值的演化。下标 $0$ 和 $t$ 分别代表初始时刻和 $t$ 时刻,则自旋演化为
\begin{equation}
\left\lvert a \right\rangle \rightarrow \mathrm{e} ^{- \mathrm{i} \hat S_k\omega t} \left\lvert a \right\rangle ,\quad \left\langle \hat S_{i}\right\rangle_t=\sum^{3}_{i=1}( \mathrm{e} ^{-\hat J_k\omega t})^i_j\left\langle \hat S_{j}\right\rangle_0 ~.
\end{equation}