“三软”煤层
编辑三软煤层是指煤层顶板软、底板软、煤质软,顶板软指直接顶顶板岩层裂隙发育,破碎、抗压强度指数很低,属一类不稳定顶板,一旦暴露就很快冒落,底板软是指底板的抗压强度很低(α 4MPa),容易扎底,又是遇水膨胀、变软。煤质软指煤体强度底,普氏系数 f
4MPa),容易扎底,又是遇水膨胀、变软。煤质软指煤体强度底,普氏系数 f 1,节理发育、煤层不稳定、易破碎[1]。
1,节理发育、煤层不稳定、易破碎[1]。
目录编辑
1 三软煤层智能化开采制约因素编辑
三软煤层智能化开采主要存在以下制约因素:
(1)受制于深部复杂应力环境,三软煤层工作面极易发生煤壁片帮、顶板漏冒等现象,综采工作面围岩控制难以实现智能化。
由于深部三软煤层围岩应力高、强度低、流变特征明显,煤壁极易发生片帮,并诱发顶板冒漏,采煤机截割过程中需要对煤壁、顶板、液压支架伸缩梁、护帮板等信息进行全方位实时感知,受制于井下光照环境差、围岩与液压支架传感器缺乏、控制精度与时效性差等,导致现有传感技术难以实现对井下围岩环境进行全面实时感知,且受制于煤壁片帮冒顶机理尚不明确,难以对煤壁片帮冒顶进行有效预测与精准控制。
(2)煤层仰、俯角及倾斜角度变化导致液压支架易扎底、刮板输送机易发生上窜下滑等,工作面直线度控制困难,制约综采工作面智能化、少人化推进。
深部三软煤层底板松软、遇水易泥化,当存在一定的俯斜角度时,则液压支架极易发生扎底,导致综采工作面推进困难;工作面倾斜角度变化导致刮板输送机易发生上窜下滑,工作面直线度控制困难,管理难度大,严重制约智能化开采技术的应用。目前,基于惯性导航的工作面直线度保持技术尚难以直接应用于倾斜煤层条件,而且缺乏高效的刮板输送机上窜下滑控制算法,导致倾斜三软煤层难以实现智能化开采。
(3)深部三软煤层巷道变形量大,综采工作面两端头及超前段支护困难,极大地限制了综采装备群的智能协调推进。
受制于深部围岩复杂的高地应力环境及流变特性,工作面巷道变形量大,需要频繁的进行巷道起底、扩帮等,工人劳动强度大,传统的超前支护技术与装备适应性差,难以对巷道超前支护区域的变形进行有效控制,综采工作面超前支护段难以实现智能化支护与推进。
另外,受制于井下作业空间光照差、粉尘大、温度高、空间狭小等,图像识别、视频云台等技术难以在井下有效应用,且由于综采装备群精准定位与智能导航、煤岩识别等技术均处于技术发展瓶颈期,导致深部三软煤层综采装备群难以实现智能协调推进,工作面人员劳动强度大、作业环境差、安全风险高。
2 三软煤层综采工作面智能化开采关键技术编辑
2.1 液压支架与围岩自适应智能控制技术
液压支架与围岩自适应智能控制技术采用三维CT探测与微震监测相结合的方法对工作面前方煤岩体的三向应力状态、断裂结构进行实时监测与反演,构建煤壁与围岩破断的力学模型,得出工作面煤壁与围岩失稳判据;采用压力传感器、倾角传感器等对液压支架的支护姿态与受力状态进行实时监测,构建液压支架动态承载力学模型,得出液压支架对围岩的动态承载力学特性;基于液压支架与围岩耦合作用原理及上述监测结果,构建深部三软煤层液压支架与围压耦合力学模型,得出液压支架对围岩的智能自适应支护参数与控制策略;通过在液压支架护帮板安装声波探测装置,对煤壁片帮与顶煤冒漏现象进行实时监测,当煤壁发生片帮时,则智能调整护帮板、伸缩梁的动作速度、时间与位移。基于上述监测参数与理论模型,开发深部三软煤层综采工作面围岩控制算法,搭建液压支架与围岩自适应智能控制平台,针对不同围岩状况进行分类分析及实施控制策略。同时,采用综采工作面负压除尘策略,可有效降低工作面采煤机截割过程中产生的煤尘对视线与环境的影响,辅助采用图像识别技术对采煤机截割过程中的煤壁片帮与顶板漏冒进行识别,为液压支架对围岩的智能自适应控制提供判断依据。基于上述监测数据处理结果,将综采工作面实时监测数据通过视频图像识别与三维可视化系统进行实时展示[2]。
2.2 采煤机精准定位与智能调高技术
目前,综采工作面采煤机定位主要采用两种技术途径:一种是通过红外传感器来感知采煤机与液压支架的相对位置,从而确定采煤机在工作面的相对位置;另一种是通过采煤机行走轮与刮板输送机销排的啮合关系,判断采煤机在工作面的位置。澳大利亚联邦科学院基于高精度惯性导航技术开发的LASC装置实现了对采煤机三向姿态与位置的实时监测和控制,这一系统已在我国应用。国产惯性导航装置正在试验中。针对煤层厚度变化带来的采煤机截割高度智能调整问题,国内外学者持续致力于煤岩界面识别技术攻关,提出了基于放射性探测、振动监测、电磁监测、红外探测、图像识别、电参量监测等煤岩界面识别技术与装备,但煤岩识别的技术瓶颈始终未能有效突破,国内外尚未有井下高效、精准煤岩识别技术的成功应用案例。针对采煤机精准定位与智能调高问题,采用基于地质信息模型和随采随探动态修正的采煤机采高智能调控,如图1[2]所示。
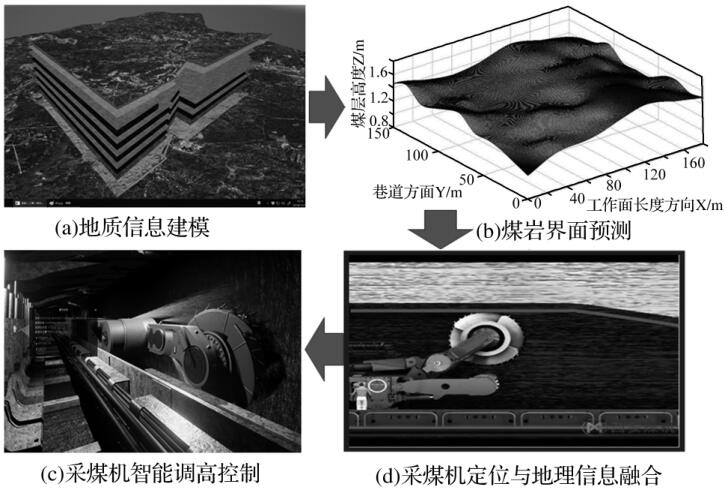
基于采区勘探钻孔数据构建矿井整体地质信息预测模型,结合工作面运输巷、回风巷掘进过程中对煤层的实际揭露情况,对整体地质信息预测模型进行修正,并在掘进过程中进行煤岩体信息的精准物探与钻探,采用差值算法构建工作面前方煤岩体分界曲面的三维精准坐标;基于高精度惯性导航等技术对采煤机的姿态及三维空间坐标进行精准定位,将采煤机的空间位置坐标与三维空间地质信息预测模型的坐标进行统一,根据修正模型的煤岩分界曲面三维空间坐标信息,对采煤机的截割高度进行精准控制,实现采煤机的精准定位与智能调高控制。
目前,受制于钻探、物探等探测技术的精度、可靠性等因素,以及采煤机三维姿态与空间定位技术尚存在一定的累计误差,在一定程度限制了采煤机精准定位与智能调高技术在深井三软煤层的应用,后续仍需要在地质探测及采煤机精准定位与智能导航技术方向进行突破[2]。
2.3 刮板输送机智能调斜工艺与技术
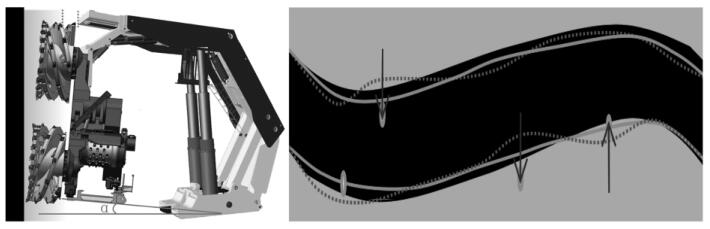
针对深部三软煤层赋存条件,当工作面存在俯仰角与倾斜角度时,刮板输送机易出现飘溜、啃底与上窜下滑等问题,如图2[2]所示,工程现场主要采用调整刮板输送机推移顺序、采煤机下滚筒卧底量等进行刮板输送机的控制与调整。目前,综采工作面刮板输送机智能调斜尚处于起步阶段,文献对刮板输送机智能调斜技术进行了探索,提出了刮板输送机上窜下滑的自动控制策略,但并没有解决工作面存在俯仰角度时的调斜控制难题。综采工作面刮板输送机智能调斜主要以提前预防为主,通过对刮板输送机三向姿态进行智能实时监测,实现对刮板输送机上窜、下滑的提前预防;当出现极端情况导致刮板输送机发生上窜、下滑时,则需要调整综采设备群的推进时序;针对刮板输送机啃底、飘溜等问题[2]。
2.4 智能高效超前支护技术
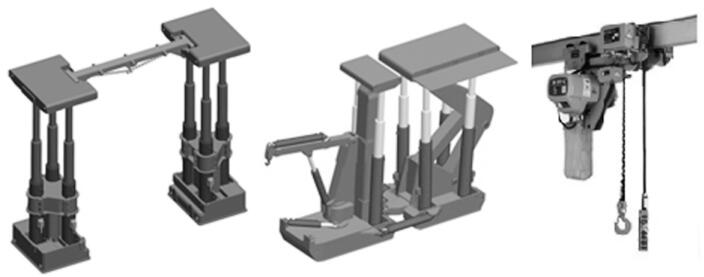
目前,综采工作面超前支护主要采用两种支护形式:一种为采用单体液压支柱进行支护,这种支护形式存在支护强度低、劳动强度大、支护效率低等问题;另外一种则采用超前液压支架,目前已经在西部条件优越矿区实现了超前液压支架的远程遥控操作,提高了超前支护的自动化水平,但传统超前液压支架存在对顶板反复支撑破坏、对巷道变形适应性差等问题,难以适用于深部大变形条件。针对深部三软煤层大变形巷道超前支护难题,笔者及团队曾提出了“主动高效支护与非等强支护”的支护理念,通过创新研发具有双列多节式结构的巷道超前支护液压支架,在兖矿集团东滩煤矿实现了深部大变形巷道的有效支护,但巷道超前支护的自动化控制尚处于起步阶段。针对淮南矿区千米深井综采工作面超前支护难题,研发了单元式超前液压支架及吊装机构,如图3[2]所示,利用单元式超前支架实现对巷道超前段的强力支护,利用单轨吊、吊装机进行单元式超前液压支架的快速搬移。针对深部三软煤层巷道变形量大、巷道底板条件差等问题,提出了单元式智能自适应超前液压支架支护方案,通过对超前液压支架支护结构进行创新设计,提高超前液压支架对巷道顶底板变形的适应性,并配套研发了超前液压支架智能作业平台,提高了超前液压支架对未硬化巷道底板条件的适应性,实现千米深井综采工作面超前支护区域的智能自适应支护及支护设备的快速、自动搬运[2]。
2.5 综采装备群智能协同控制技术
目前,综采工作面自动控制系统已经在液压支架自动跟机移架、采煤机记忆截割、运输系统煤流平衡、远程遥控、一键启停等多项关键技术取得突破,基本实现了简单地质条件下单机设备的自动化及综采设备群的联动控制,但综采装备群之间的数据挖掘与融合共享、位姿关联关系、智能协同控制等尚未取得实质性突破。针对深部复杂围岩条件,笔者及团队分析了超长工作面不同分区围岩的破断特征与失效机理,开发了基于支架与围岩耦合关系的液压支架智能自适应控制算法,提高液压支架对深部围岩的适应性。通过分析深部围岩破断的主要影响因素,初步提出了千米深井综采工作面围岩失稳预警准则,提高了综采装备群对深部围岩的适应性。针对综采装备群协同控制与快速推进难题,提出了综采装备群智能协同控制策略,如图4[2]所示。
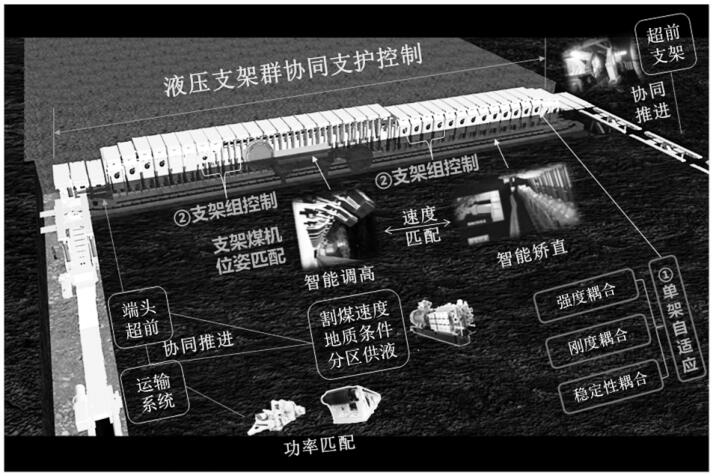
首先对综采装备群的时空坐标系进行统一,通过建立综采装备群的运动学与动力学模型得出各设备之间的位姿关联关系;其次在单机设备自动化的基础上进行综采设备群的精准定位与智能导航,确定各设备间的空间位置关系;对综采装备群的海量监测信息进行多源异构融合分析与挖掘,实现综采装备群信息的实时共享与互联互通;开发综采装备群协同控制算法及专家系统,构建工作面不同区域、不同围岩条件变化、不同生产工况调整的综采装备群协同控制模型,实现工作面开采工艺、推进工序的智能化;基于压力、瓦斯、粉尘等因素对开采工艺、装备控制及系统行为方式的影响,建立综采装备群智能协同推进模型,实现综采装备群支护强度、截割高度、牵引速度等的协同动作[2]。
参考文献
推荐文献
- [1]
林柏泉,李庆钊,杨威,吴海进,郝志勇.基于千米钻机的“三软”煤层瓦斯治理技术及应用[J].煤炭学报,2011,36(12):1968-1973.
- [2]
袁永,屠世浩,马小涛,孙璐璐,白庆升.“三软”大采高综采面煤壁稳定性及其控制研究[J].采矿与安全工程学报,2012,29(01):21-25.
- [3]
彭苏萍,王希良,刘咸卫,赵森林.“三软”煤层巷道围岩流变特性试验研究[J].煤炭学报,2001(02):149-152.
- [4]
王琦,潘锐,李术才,何满潮,任尧喜,王雷,丁国利,孙会彬,江贝.三软煤层沿空巷道破坏机制及锚注控制[J].煤炭学报,2016,41(05):1111-1119.
- [5]
王沉,屠世浩,李召鑫,白庆升,屠洪盛.深部“三软”煤层回采巷道断面优化研究[J].中国矿业大学学报,2015,44(01):9-15.
- [6]
来兴平,崔峰,曹建涛,吕兆海,康延雷.三软煤层综放工作面覆岩垮落及裂隙导水特征分析[J].煤炭学报,2017,42(01):148-154.
- [7]
曹树刚,邹德均,白燕杰,何平均,伍厚荣.近距离“三软”薄煤层群回采巷道围岩控制[J].采矿与安全工程学报,2011,28(04):524-529.
- [8]
唐建新,王艳磊,舒国钧,代张音,刘姝.高应力“三软”煤层回采巷道围岩破坏机制及控制研究[J].采矿与安全工程学报,2018,35(03):449-456.
暂无