机械臂
编辑1 类型编辑
- 笛卡尔机器人 /龙门机器人:用于取放工作、涂抹密封剂、装配操作、搬运机床和电弧焊。这是一种具有三个移动轴,且各轴与笛卡尔坐标重合的机械臂。
- 圆柱形机器人:用于组装操作、机床操作、点焊和压铸机操作。这是一种各轴形成一个圆柱坐标系的机械臂。
- 球形机器人/极地机器人用于搬运机床、点焊、压铸、补口机、气焊和电弧焊。这是一种各轴形成极坐标系的机械臂。
- SCARA机器人:用于拾取和放置工作、涂抹密封剂、组装操作和搬运机床。这种机械臂有两个平行的旋转关节,可以提供在一个平面内的运动。
- 关节机器人:用于装配操作、压铸、补口机、气焊、电弧焊和喷漆。这是一种至少有三个旋转关节的机械臂。
- 并联机器人:其一个用途是作为座舱飞行模拟器的移动平台。这是一种具有并联移动或旋转关节的机械臂。
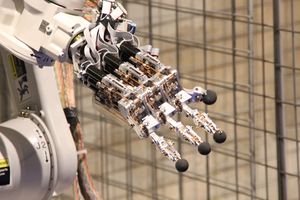
- 拟人机器人:它的形状类似人手,即具有独立的手指和拇指。
2 著名的机械臂编辑
3 低成本机械臂编辑
从2010年开始的十年中,低成本机械臂的供应大幅增加。虽然这种机械臂主要作为兴趣爱好或教学设备销售,但在实验室自动化中的应用已经提出,例如它们可作为自动取样器[10][11]。
以下是各种低成本机械臂及其规格的概述。
| 模型 | 公司 | 轴数 | 重复精度(mm) | 最大有效载荷(g) | 最大角速度(度/秒) | 垂直行程(厘米) | 水平行程(厘米) | 末端效应器 | 成本(美元) | 网站 | 完整规格 |
|---|---|---|---|---|---|---|---|---|---|---|---|
| Dorna | Dorna | 5 | 0.025 | 1134 | 150 | 86.3 | 58.4 | 激光、照相机、夹具、刀架 | 1,500.00美元 | dorna.ai | Specification.pdf |
| 魔术师 | DOBOT | 4 | 0.2 | 500 | 320(半有效载荷) | 未知 | 32.0 | 3D打印喷嘴、激光器、笔杆、真空吸盘、夹子 | 1199.00美元 | 多博魔术师 | specification.html |
4 分类编辑

参考文献
- [1]
^职业安全与健康管理局技术手册.
- [2]
^关于空间机器人的论文,第9页.
- [3]
^IEEE Xplore:加拿大臂抓住吊杆,并将其放置在必要的位置,以便进行全面检查。.
- [4]
^"Curiosity Rover - Arm and Hand". JPL. NASA. Retrieved 2012-08-21..
- [5]
^Jandura, Louise. "Mars Science Laboratory Sample Acquisition, Sample Processing and Handling: Subsystem Design and Test Challenges" (PDF). JPL. NASA. Retrieved 2012-08-21..
- [6]
^"Curiosity Stretches its Arm". JPL. NASA. 21 August 2012. Retrieved 2012-08-21..
- [7]
^Billing, Rius; Fleischner, Richard (2011). "Mars Science Laboratory Robotic Arm" (PDF). 15th European Space Mechanisms and Tribology Symposium 2011. Retrieved 2012-08-21..
- [8]
^Hille, Karl (2018-11-16). "OSIRIS-REx is Prepared to TAG an Asteroid". NASA. Retrieved 2018-12-15..
- [9]
^[1].
- [10]
^Carvalho, Matheus C.; Eyre, Bradley D. (2013-12-01). "A low cost, easy to build, portable, and universal autosampler for liquids". Methods in Oceanography. 8: 23–32. doi:10.1016/j.mio.2014.06.001..
- [11]
^McMorran, Darren; Chung, Dwayne Chung Kim; Li, Jonathan; Muradoglu, Murat; Liew, Oi Wah; Ng, Tuck Wah (2016-02-16). "Adapting a Low-Cost Selective Compliant Articulated Robotic Arm for Spillage Avoidance". Journal of Laboratory Automation (in 英语). 21 (6): 799–805. doi:10.1177/2211068216630742. ISSN 2211-0682. PMID 26882923..
- [12]
^Staff (Sandia National Labs) (August 16, 2012), "Life-like, cost-effective robotic hand can disable IEDs", R&D Magazine, rdmag.com, retrieved September 13, 2012.
暂无